

Intelligent planning method for obstacle avoidance and target grabbing of SMA driving space robotic arm
A technology of intelligent planning and robotic arms, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the complex interaction between spacecraft and flexible robotic arms, the complexity of the space environment, and the difficulties in model building and solving processes, achieving extended Effects of on-orbit working life, improvement of solution rate, and improvement of solution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0086] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
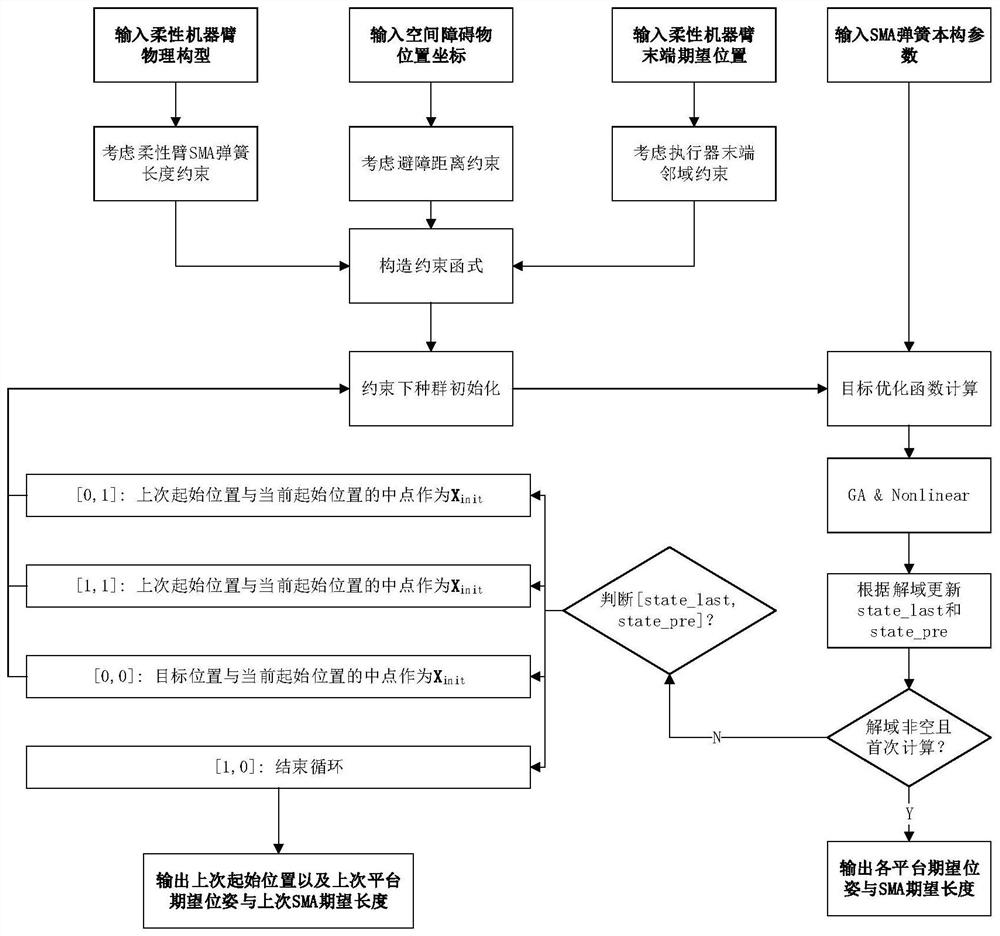
[0087] An embodiment of the present invention provides an intelligent planning method for obstacle avoidance and target grasping of an SMA-driven space robot arm. Considering that the space flexible robot arm is sequentially connected by a plurality of joints, each joint contains multiple sets of shape memory alloy springs ( shape memory alloys, abbreviated as SMA), connecting rods, disc platforms, and the head end of the space flexible robot arm is fixed to the spacecraft. Adjust the current through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More