

Unmanned aerial vehicle cluster cooperative reconnaissance method and system under limited communication bandwidth condition
A communication bandwidth and UAV technology, applied in the field of target detection, can solve the problems of large target detection delay, low accuracy, limited communication bandwidth, etc., to reduce computational complexity and space complexity, eliminate missed detection or error, improve the effect of real-time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
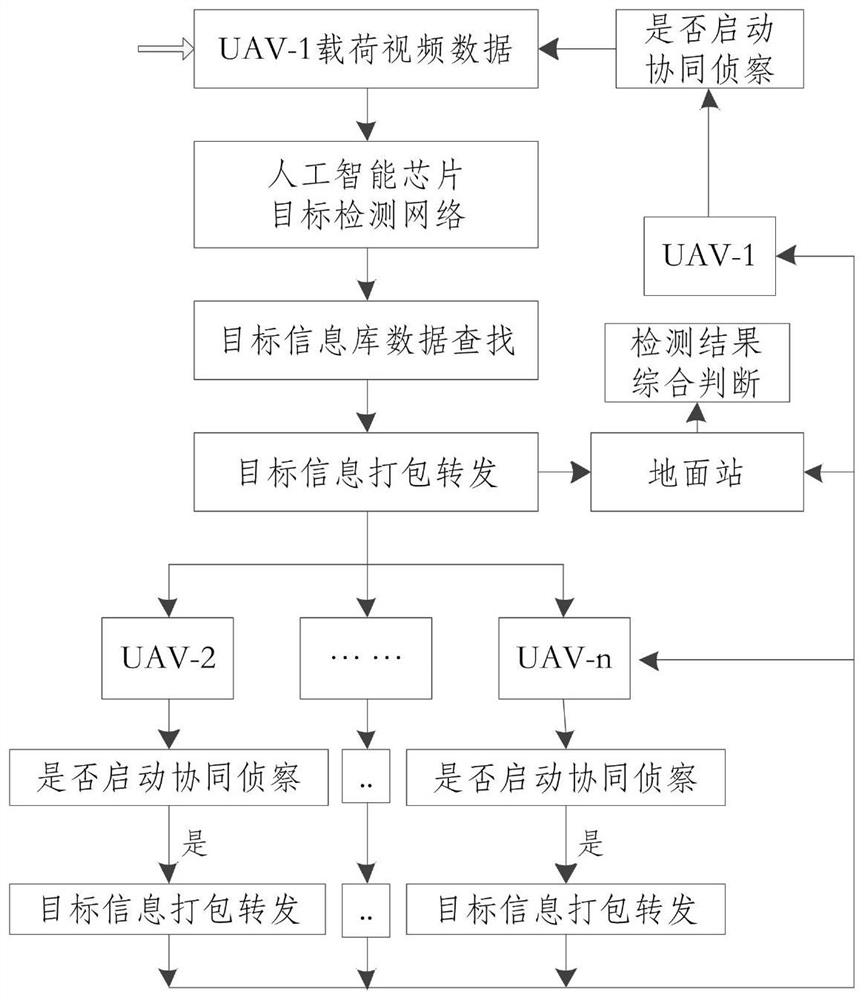
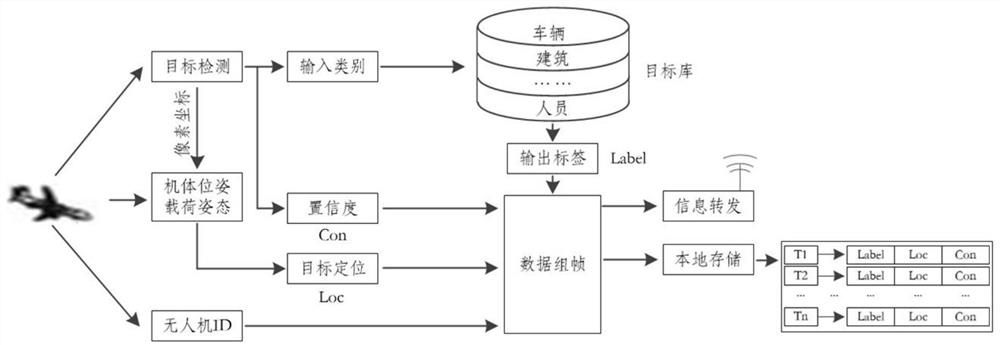
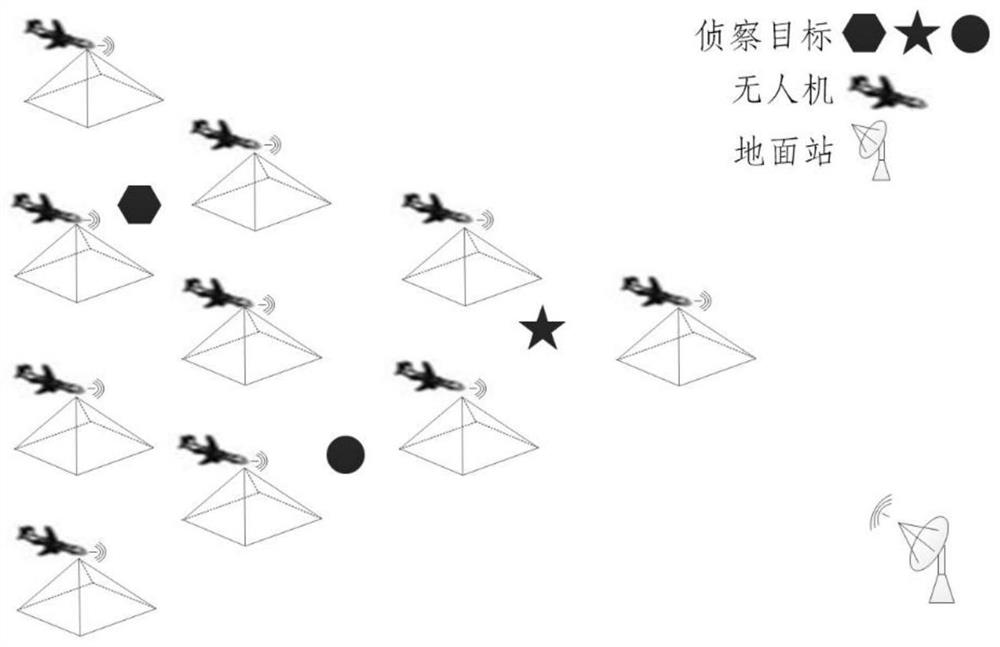
[0113] Taking the image taken by the photoelectric reconnaissance payload of the UAV as an example, first, based on the pruned and compressed lightweight target detection model, the data processing of the reconnaissance payload is realized in the airborne artificial intelligence chip, and the real-time detection of multiple types of targets is completed. , to obtain the target category and position information; then, according to the flight parameters of the drone and the photoelectric load parameters to locate the target, obtain the latitude and longitude of the target, and the drone will frame and forward the acquired target location and category information; After receiving the target information, other UAVs decide whether to conduct cooperative reconnaissance. If cooperative reconnaissance is required, other UAVs fly to the target area to conduct reconnaissance again, obtain the target information from the perspective of the UAV and forward it; finally, quote the comprehensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More