

Real-time positioning method and device fusing laser radar and IMU sensor information
A laser radar, real-time positioning technology, applied in the direction of measuring devices, instruments, electromagnetic wave re-radiation, etc., can solve the problems that the NDT positioning results cannot be directly used in the control link, the positioning is delayed, and the NDT positioning frequency is low. Real-time and robustness, suppressing delay, reducing the effect of time delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
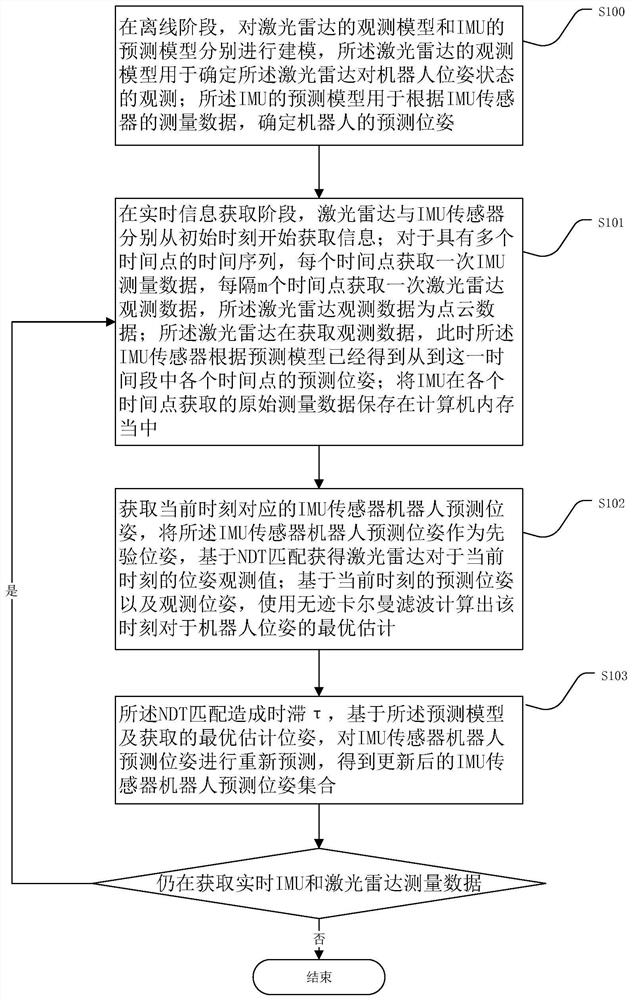
[0030] combine first Figure 1-3 Illustrate the flow of a real-time method for fusing lidar and IMU sensor information in an embodiment of the present invention, the method includes the following steps:
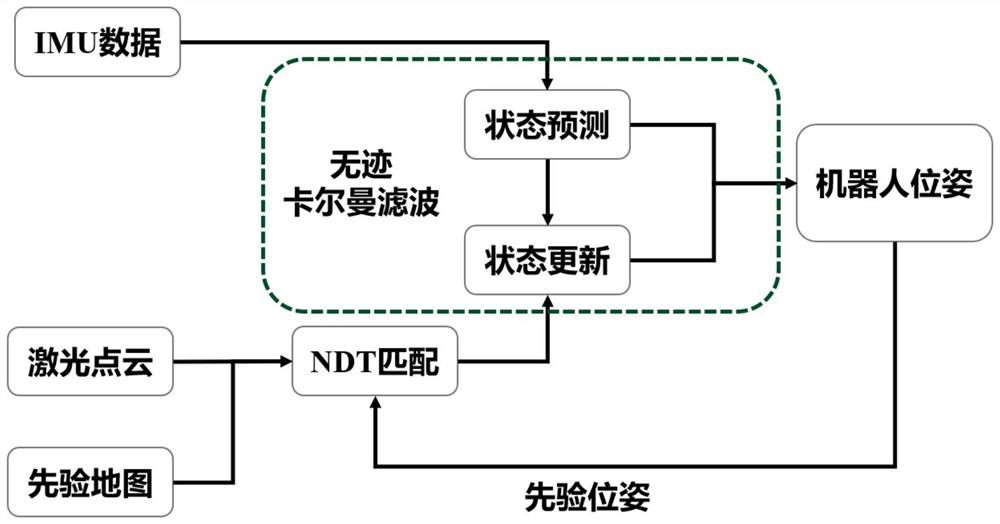
[0031] Step S100: In the offline stage, model the observation model of the lidar and the prediction model of the IMU respectively, and the observation model of the lidar is used to determine the impact of the lidar on the robot according to the point cloud matching result of the lidar. Observation of pose state; The predictive model of described IMU is used for determining the predictive pose of robot according to the measurement data of IMU sensor;
[0032] Step S101: In the real-time information acquisition stage, the lidar and IMU sensors acquire information from the initial moment respectively; for time series Time={t k-m ,t k-m+1 ...,t k}, IMU measurement data is obtained at each time point, and lidar observation data is obtained at every m time points, and the lidar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More