Unmanned aerial vehicle dynamic target flight path planning method and system based on A* algorithm
A dynamic target and track planning technology, applied in control/adjustment system, non-electric variable control, three-dimensional position/course control, etc., to improve efficiency, reduce calculation burden, improve accuracy and scientific effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0076] According to a kind of UAV dynamic target track planning method based on A* algorithm provided by the present invention, such as image 3 shown, including:
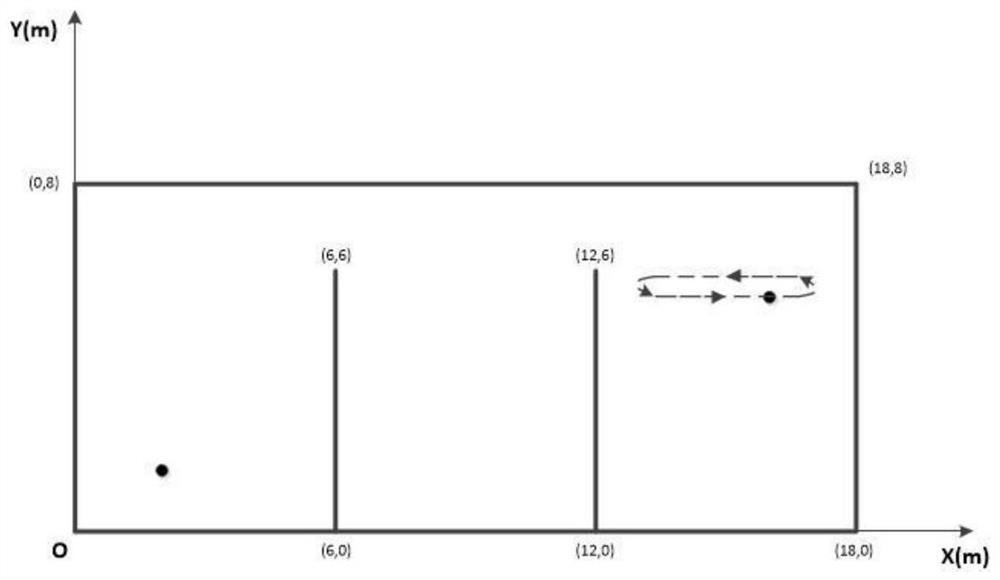
[0077] Step S1: Carry out environment modeling for indoor scenes of UAV and dynamic target activities;
[0078] Step S2: For the dynamic target, on the premise that the dynamic target moves at a uniform speed, set the motion model of the dynamic target, obtain the motion law of the dynamic target, calculate the intersection point of the dynamic target and the motion of the UAV, and plan the trajectory of the UAV provide an endpoint;
[0079] Step S3: using the improved A* algorithm to calculate an optimized flight path of the UAV between the initial position of the UAV and the final intersection point of the UAV and the dynamic target;
[0080] The improved A* algorithm is an optimized A* algorithm. After calculating the priorities of all adjacent nodes of the current node n, the priorities of all adjacent nodes ...
Embodiment 2
[0127] Embodiment 2 is a preferred example of embodiment 1
[0128] Aiming at the scene where the UAV tracks the dynamic target, the invention takes the initial position of the UAV as the starting point and the position where the UAV meets the dynamic target as the end point, and proposes a UAV dynamic target track based on the A* algorithm planning algorithm. First, environment modeling is carried out for the indoor scene of UAV and dynamic target activities, including abstracting the indoor environment, determining the position and length of indoor walls and obstacles, and then establishing two-dimensional plane coordinates for the indoor two-dimensional plane system, determine the coordinates of the UAV, dynamic target, obstacle and the boundary conditions of the indoor scene, and carry out indoor environment modeling; then, for the dynamic target, on the premise of the dynamic target moving at a uniform speed, design the motion model of the dynamic target, master The move...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com