

Method and system for quickly identifying three-dimensional position of tongue based on magnetic mark
A technology of three-dimensional position and magnetic marking, which can be applied to devices that can be operated by the disabled, medical science, prostheses, etc., can solve the problems of low use value, slow speed of nonlinear optimization, low real-time performance, etc., and achieve a portable Sexual, high-tolerance effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
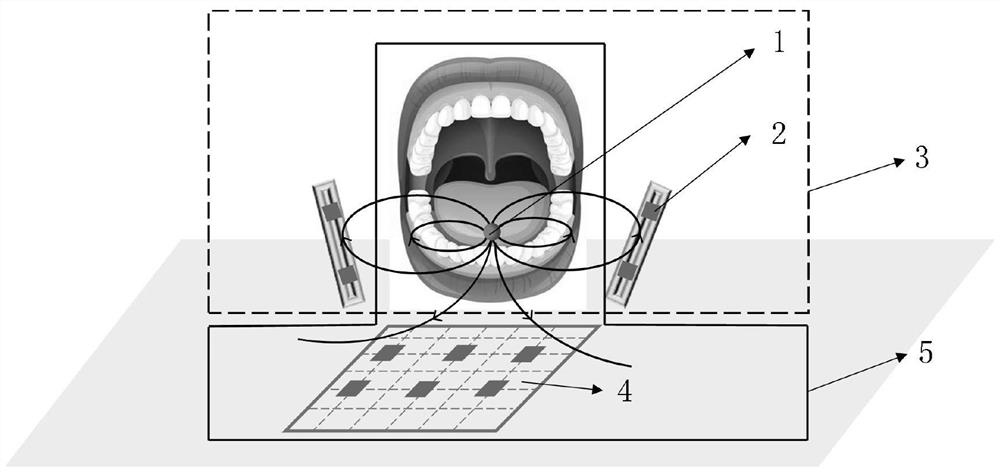
[0026] Such as figure 1 As shown, a system for quickly identifying the three-dimensional position of the tongue based on magnetic markers, including a magnet position solution system 3 based on a neural network and a nonlinear inverse optimization system 5 based on a magnetic dipole model, and a magnet position solution system based on a neural network 3 includes a permanent magnet 1 and a head-mounted magnetic sensor 2; a nonlinear inverse optimization system based on a magnetic dipole model 5 consists of a permanent magnet 1 and a sensor array 4.
[0027] The neural network includes a training module and a practical application module. The input end of the training module is connected to the output data of the head-mounted magnetic sensor 2, the output end of the training module is connected to the position data of the permanent magnet 1 output by the sensor array 4, and the permanent magnet 1 output by the sensor array 4 The position data is obtained by inverting the magnet...
Embodiment 2
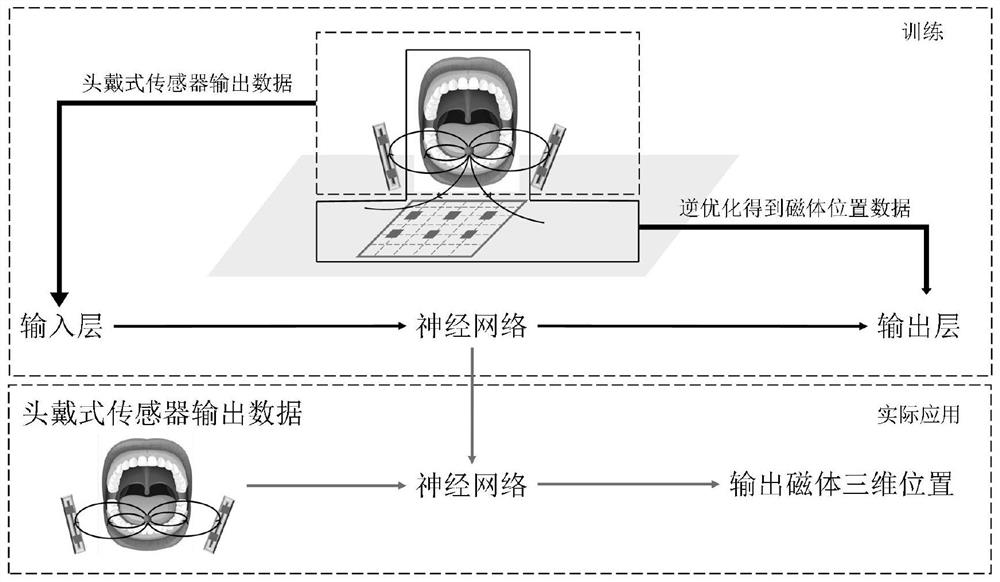
[0033] Such as figure 2 As shown, a method for quickly identifying the three-dimensional position of the tongue based on magnetic markers includes the following steps:
[0034] S1. A permanent magnet is set on the tip of the tongue as a tongue posture marker;
[0035] S2. Obtain the three-dimensional space position of the tongue posture marker through the nonlinear inverse optimization system of the magnetic dipole model;
[0036] S3. While step S2 is being executed, measure the magnetic field around the tongue posture marker through the head-mounted magnetic sensor device, and output the magnetic induction intensity of the magnetic field;
[0037] S4, using the three-dimensional spatial position of the tongue posture marker obtained in step S2 as the output data set of the neural network, and using the magnetic induction intensity of the magnetic field obtained in step S3 as the input data set of the neural network to train the neural network;
[0038] S5. Obtain the three...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More