Intelligent ship path planning method based on improved A* algorithm
A path planning and algorithm technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc. The scene is limited and other problems, to achieve the effect of reducing the amount of calculation, increasing the speed, and improving the search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
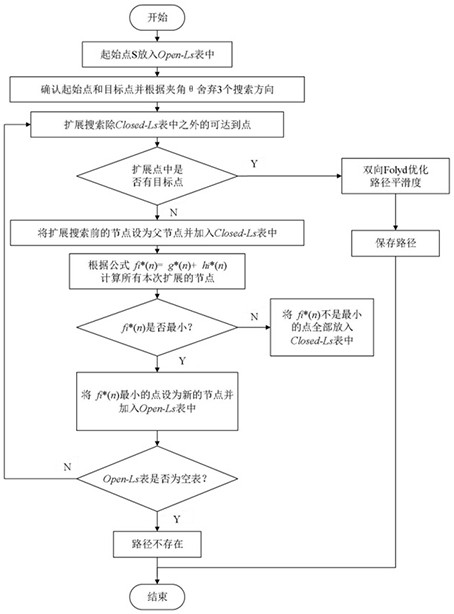
[0038] Please refer to figure 1 ,in, figure 1 It is a method flowchart of a preferred embodiment of the intelligent ship path planning method based on the improved A* algorithm provided by the present invention. The intelligent ship path planning method based on the improved A* algorithm includes the following steps:
[0039] S1. Establish a grid map, and put the starting point S and the obstacle point into the Open linked list and the Closed linked list respectively;
[0040] S2. Confirm the starting point and the target point and discard 3 search directions among the 8 search directions according to the included angle θ;
[0041] S3, check whether there is a target point in the extended node in the Open linked list, if there is no target point, then skip to step 4; if there is a target point, then use the bidirectional Folyd algorithm to optimize t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More