

Multi-target object motion control method and device, terminal equipment and medium
A technology of motion control and target object, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as complicated operation, reduced reliability of induced signals, and complicated control methods, and achieve High control accuracy, avoiding visual fatigue and high control efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
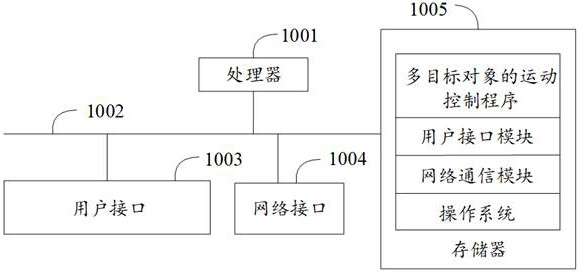
[0046] Such as figure 1 as shown, figure 1 It is a schematic diagram of the device structure of the hardware operating environment involved in the solution of the embodiment of the present invention.
[0047] It should be noted that the terminal device in this embodiment of the present invention may be a device for performing motion control on multiple objects, and the terminal device may specifically be a VR device or the like.
[0048] Such as figure 1As shown, the device may include: a processor 1001 , such as a CPU, a network interface 1004 , a user interface 1003 , a memory 1005 , and a communication bus 1002 . Wherein, the communication bus 1002 is used to realize connection and communication between these components. The user interface 1003 may include a display screen (Display), an input unit such as a key...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More