

Accurate fixed-point landing autonomous navigation method and system based on landmark image
A technology of precise point determination and autonomous navigation, applied in the field of deep space exploration visual navigation, can solve the problems of low landmark matching efficiency, complex landmark representation, navigation result error, etc., to achieve a wide range of application value and market prospects, reduce demand, reduce effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments disclosed in the present invention will be further described in detail below in conjunction with the accompanying drawings.
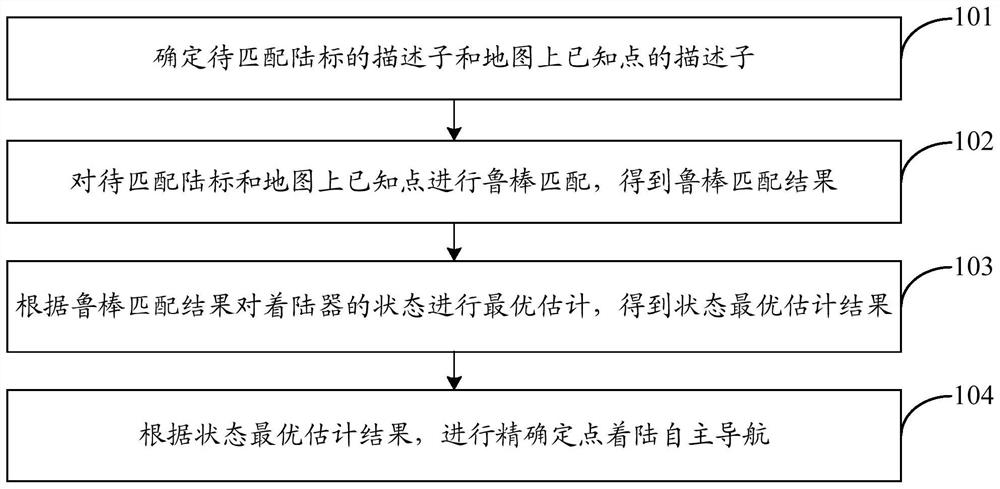
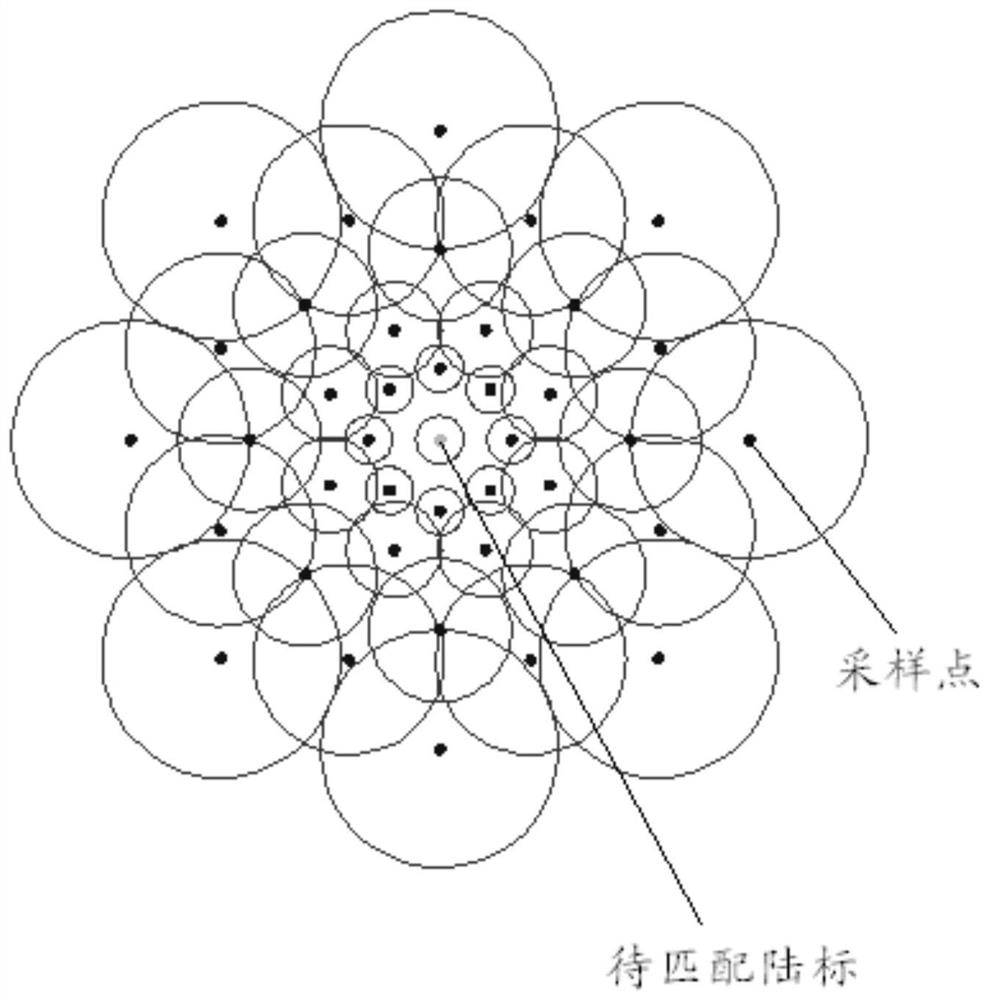
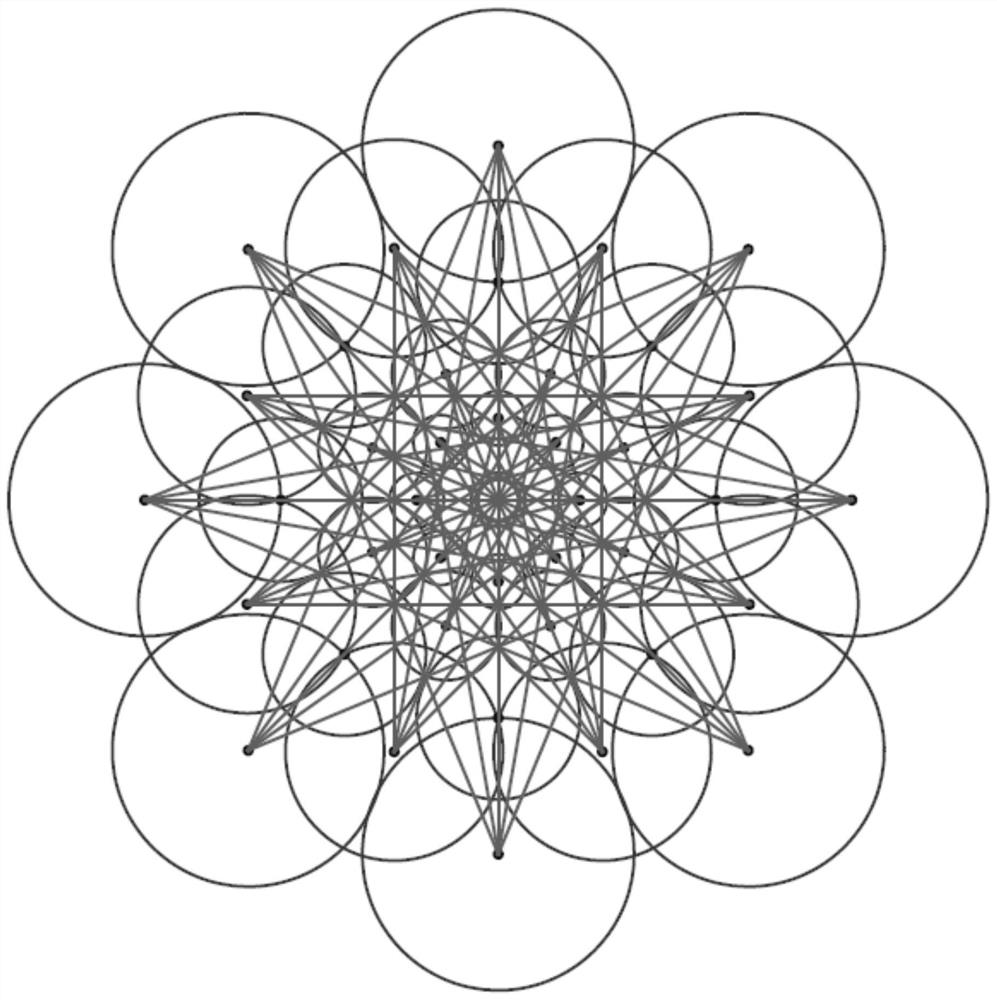
[0082] One of the core ideas of the present invention is: drawing lessons from the processing process of the visual information of the human retina, selecting a small number of sampling points evenly and symmetrically around the landmark, and using the gray value relationship of these points to construct a binary string to monitor the landmark. Sparse representation; then, use the fuzzy information of the peripheral sampling points to quickly determine whether it is a potential matching object, and then use the detailed information of the internal sampling points to determine whether it is a correct match, and obtain the 3D-2D landmark matching relationship; after that, by minimizing The reprojection error is used to estimate the pose o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More