

Control method of multi-zero signal quadrature encoder
A technology of quadrature encoding and control method, applied in the control field of multi-zero signal quadrature encoder, can solve the problems of low adaptability of multi-pole motors, unstable dynamic correction of multi-line motors, etc., to improve the accuracy of correction , Improve the accuracy of detection and ensure the effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
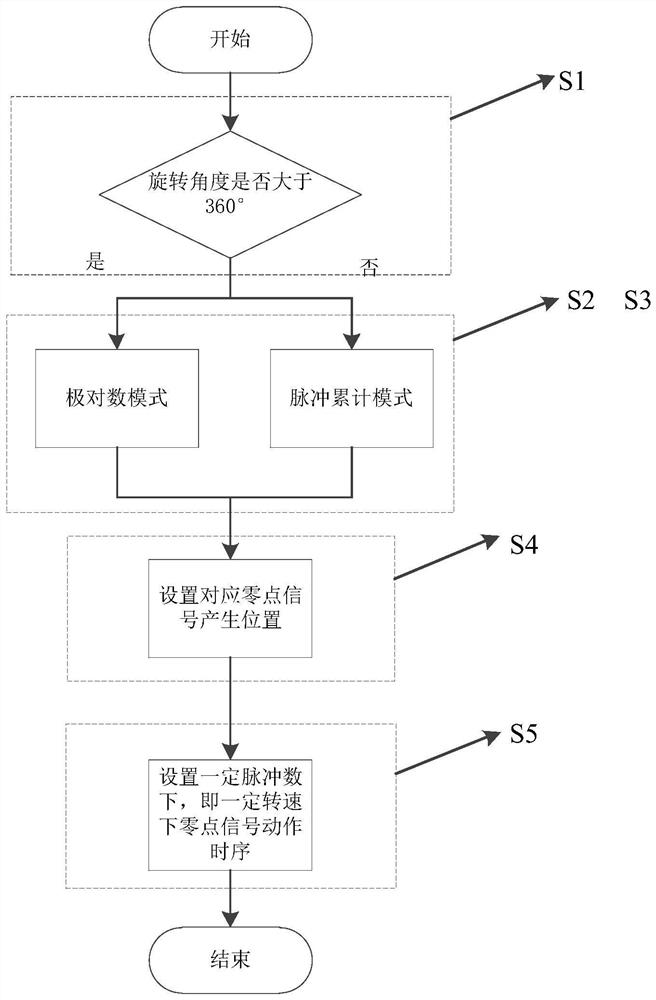
[0025] A control method for a multi-zero signal quadrature encoder, such as figure 1 shown, including the following steps:
[0026] Step S1: Select the corresponding pulse accumulation mode and pole logarithm mode according to the number of pole pairs of the motor, the rotation angle and the frequency multiplication of the encoder;
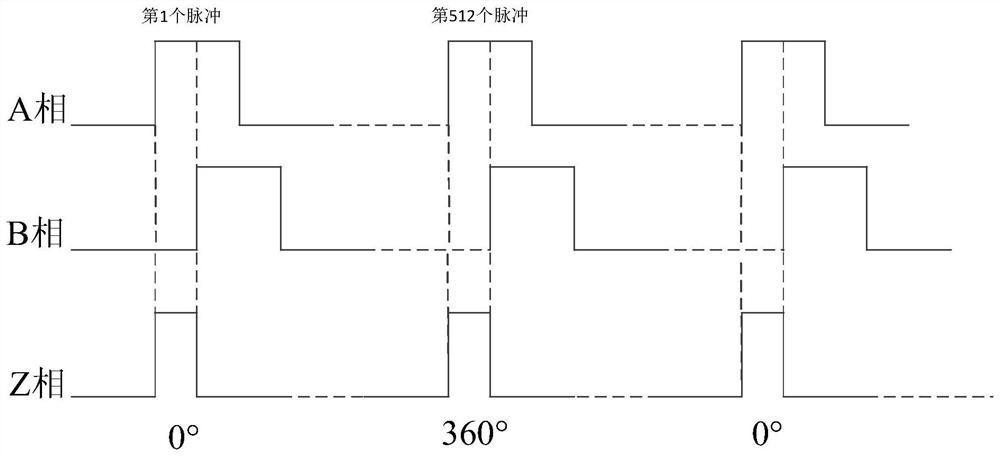
[0027] Step S2: Pulse accumulation mode: when the mechanical angle is less than or equal to 360°, it is set to output a calibration zero signal when the pulse accumulation reaches a certain number;
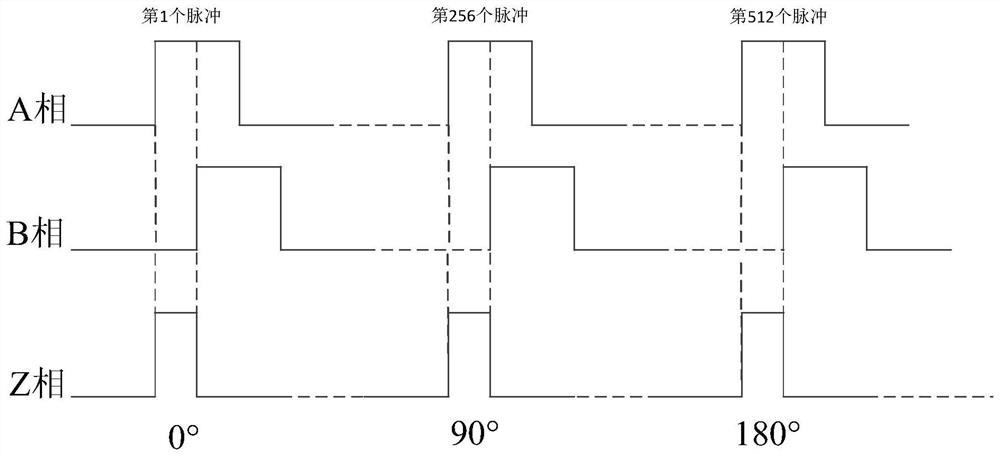
[0028] Step S3: pole logarithm mode: when the mechanical angle is greater than 360°, obtain the current pole logarithm of the motor, input it into the quadrature encoder controller, and the quadrature encoder will generate the same zero signal as the pole logarithm, and every The number of A-phase and B-phase signal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More