

Multi-unmanned aerial vehicle cooperative calculation and path control method and device
A path control, multi-drone technology, applied in wireless communication, transportation and packaging, vehicle wireless communication services, etc., can solve the problem of ignoring the fairness of drone services, users enjoying service fairness, wasting computing resources, and backward computing speed and other issues to maximize the effect of service fairness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Two existing UAV control schemes are now described:
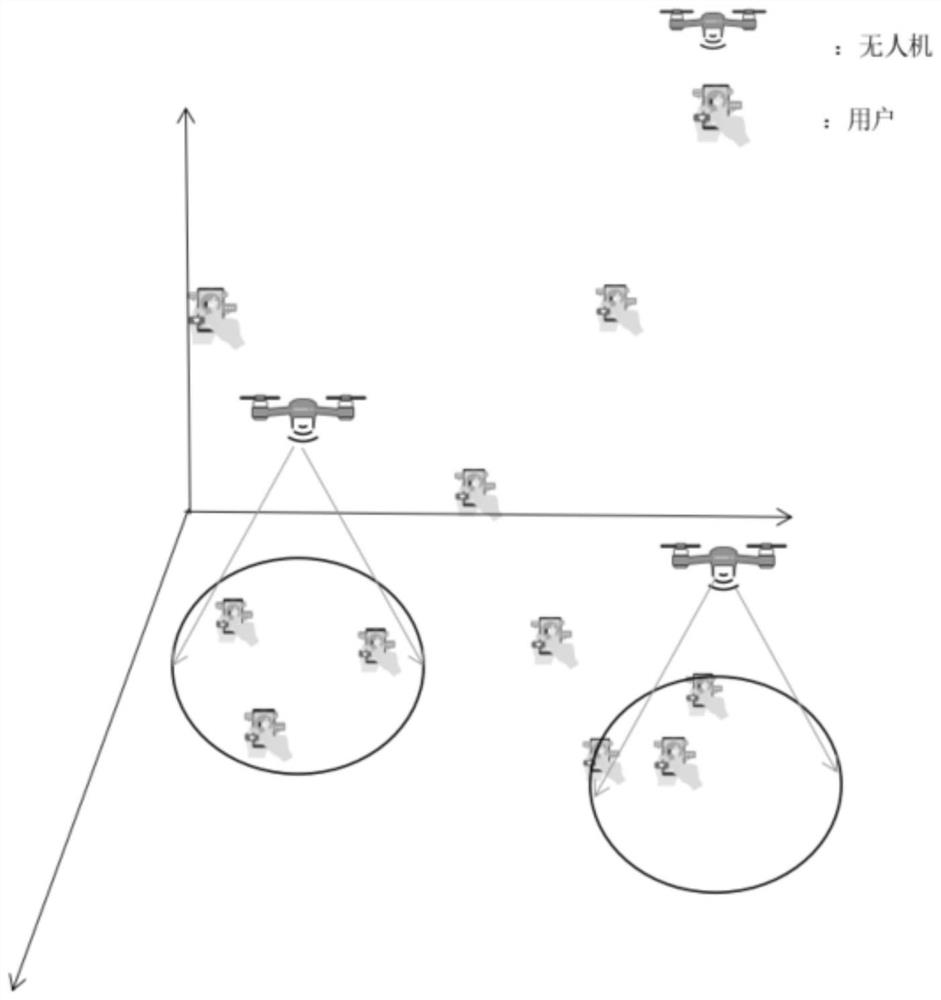
[0051] Such as figure 1 , assuming that N AR devices are randomly distributed in a max , and the positions of the AR devices are randomly distributed, the set of N devices is set as N={1, 2,...N}, and the M drones are initially set at the position of the height H, for each The AR device at the location provides edge computing services and has a stable power supply, and it is assumed that wireless power transmission and computing offloading are performed in the same frequency band to avoid mutual interference between AR devices and UAVs during task offloading. The set of M UAVs is set up as M={1,2,...M}, we assume that each AR device is in each time period Ts={1,2,...T} in a continuous time period A task with a prominent task intensity of St will be generated in each step, which needs to be calculated. At this time, the task needs to decide whether to perform local calculation on the AR device or offload the task t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More