

Map construction method for accurate positioning based on multi-segment joint optimization
A technology for precise positioning and map construction, which is used in measurement devices, instruments, surveying and navigation, etc., and can solve the problems of complex feature extraction, affecting accuracy, and high cost of millimeter-wave radar.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
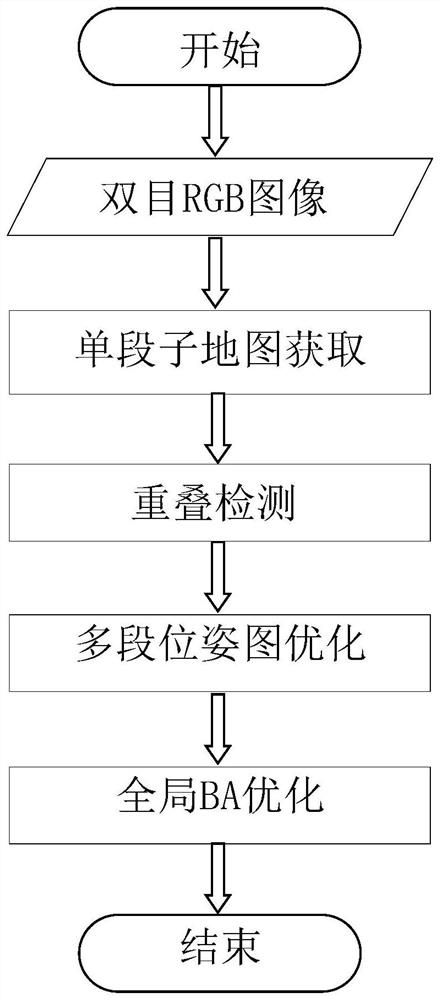
[0035] The purpose of the present invention is to provide a map construction method for precise positioning based on multi-segment joint optimization. First, a single-segment sub-map is obtained for the same scene using a visual SLAM method based on feature points, and then multi-segment joint optimization is performed on multiple single-segment sub-maps. Using multiple data from the same scene to compensate for the low accuracy of the sensor results in an accurate localization map.
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, rather than limiting it in any way.
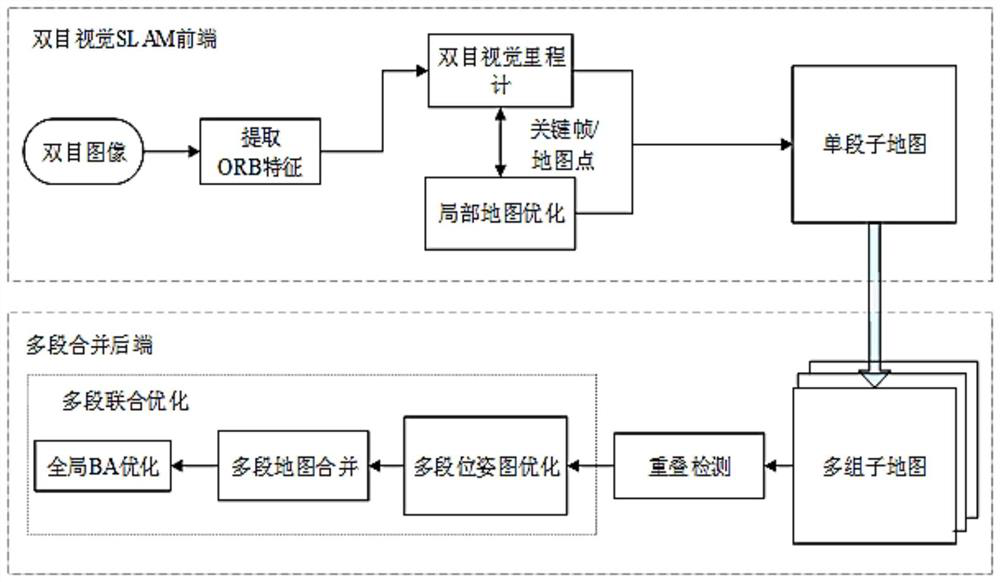
[0037] figure 1 It is a flowchart of the map construction method for precise positioning based on multi-stage joint optimization provided by the present invention; FIG. 2 is a schematic diagram of the processing flow of an emb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More