

Multi-motor coupling drive control device and method for underwater robot
An underwater robot, motor control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the underwater robot cannot be guaranteed to change the course smoothly, to enhance the anti-interference ability, strong targeting The effect of flexibility and flexibility to change the course
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
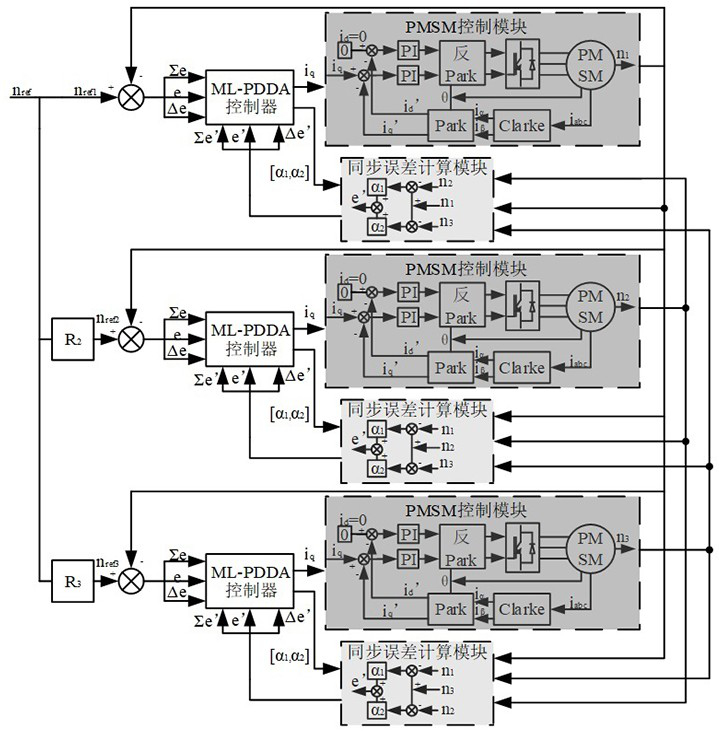
[0071] In an embodiment, a multi-motor coupled drive control device for underwater robot consists of three modules: a single motor control module, a synchronization error weight distribution module, a multi-motor mutual coupling control module. The single motor control module consists of the ML-PDDA algorithm controller and the permanent magnet synchronous motor, and the speed error of the motor is used as the input amount of the controller, and the permanent magnet synchronous motor vector control model is combined, after the ML-PDDA algorithm policy network processing, Get the control amount of the motor model Q-axis current, and the synchronous error weight loss factor α, realize the speed control of the motor, with the multi-motor mutual coupling control module to achieve underwater robot drive synergies, such as figure 1 Indicated.
[0072] The multi-motor drive control device for multi-motor, which is designed in this embodiment, is based on the actual operation of the upper...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More