

Point cloud map construction method and device, equipment, storage medium and computer program
A computer program and map construction technology, applied in computing, 3D modeling, image enhancement, etc., can solve the problems of high-precision map accuracy reduction and achieve the effect of ensuring global consistency, avoiding error accumulation, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solution and advantages of the present application clearer, the implementation manners of the present application will be further described in detail below in conjunction with the accompanying drawings.
[0033] First, several terms involved in this application are introduced.
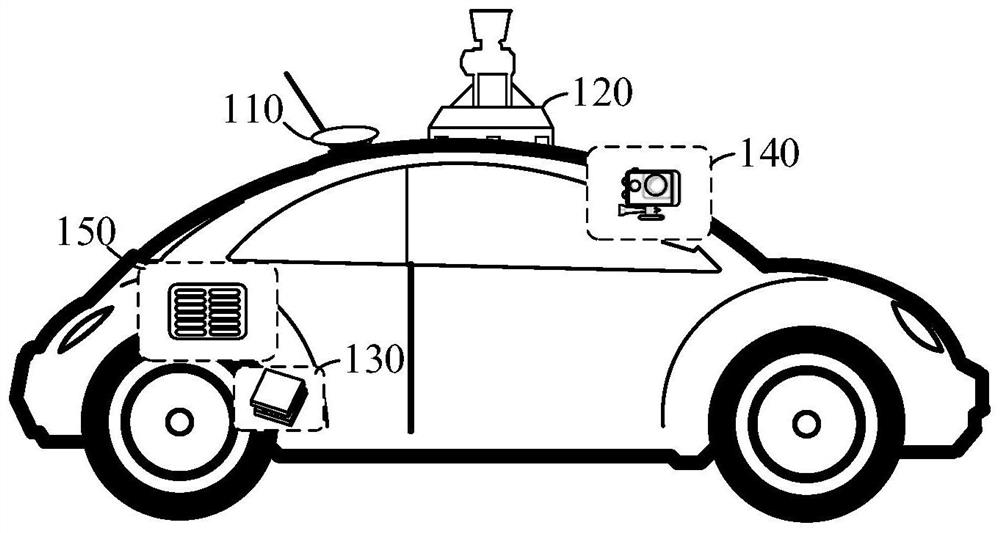
[0034] 3D point cloud data refers to a set of vectors in a 3D coordinate system. These vectors are usually expressed in the form of x, y, z three-dimensional coordinates, and are generally mainly used to represent the outer surface shape of an object. Exemplary, P k ={x k ,y k ,z k} represents the kth point in the space, Point Cloud={P 1 ,P 2 ,P 3 ,...,P v} represents a set of point cloud data, and k and v are positive integers. Exemplarily, the above-mentioned 3D point cloud data is generated by a 3D scanning device, such as lidar, stereo camera, and time-of-flight camera.
[0035] The map scanning equipment scans the environment to obtain 3D po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More