

Unmanned vehicle autonomous navigation deviation correction method
An autonomous navigation and unmanned vehicle technology, applied in the direction of motor vehicles, two-dimensional position/channel control, vehicle position/route/altitude control, etc. Problems such as poor ability to adjust deviation, achieve the effect of saving time for adjusting parameters, reliable control methods, and accurate deviation adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
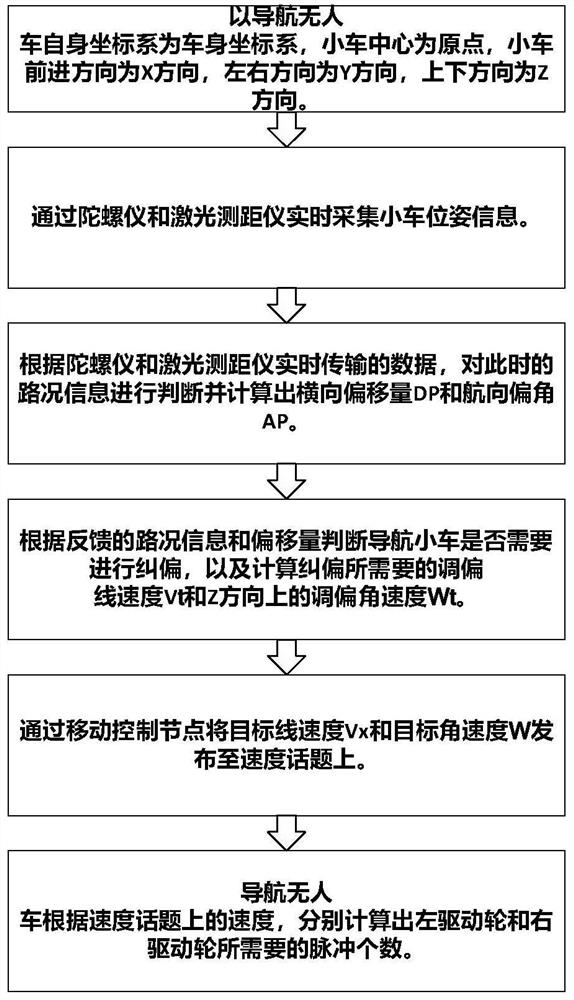
[0068] Such as figure 1 As shown, an unmanned vehicle autonomous navigation deviation correction method, including:
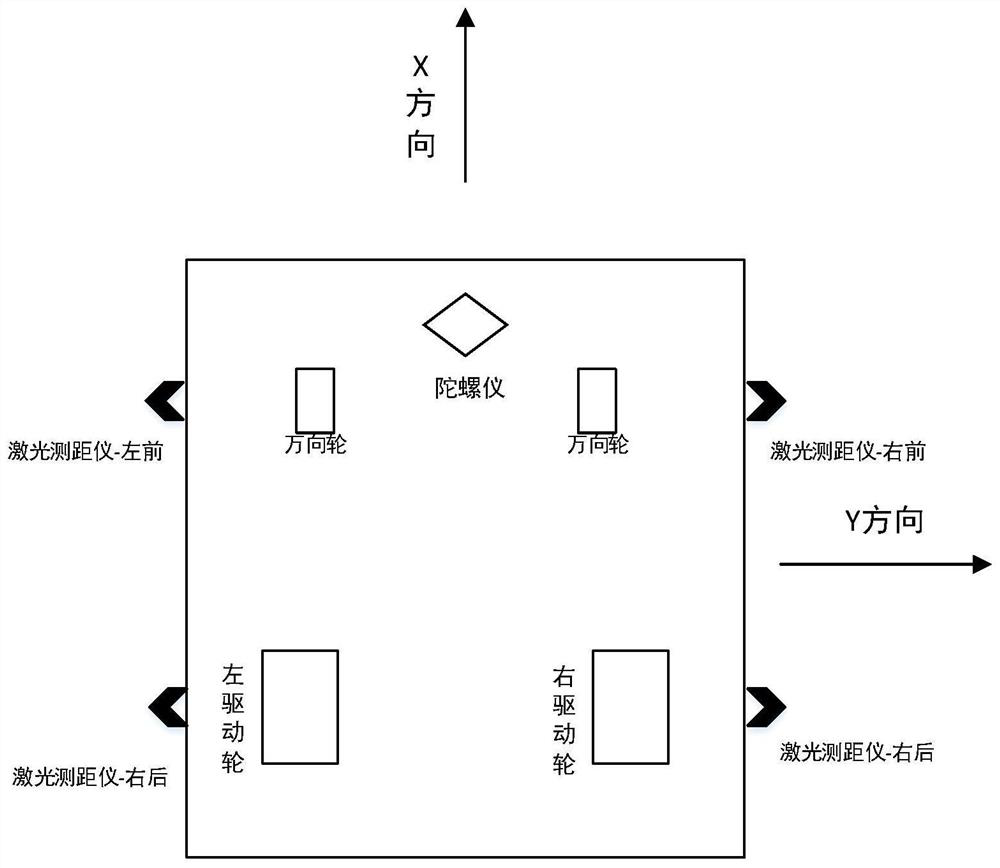
[0069] Step S1: Establish the body coordinate system with the coordinate system of the navigation unmanned vehicle itself, the center of the navigation unmanned vehicle is the origin, the forward direction of the navigation unmanned vehicle is the X direction, the left and right directions are the Y direction, and the up and down directions are the Z direction;
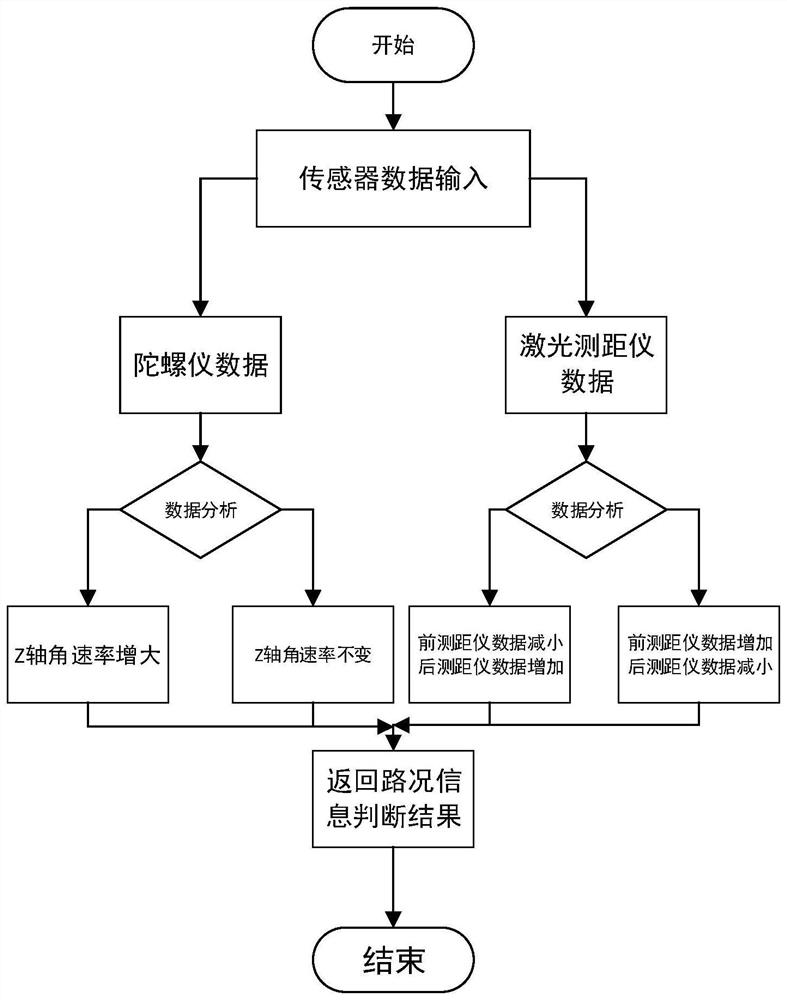
[0070] Step S2: Install the gyroscope and the laser range finder, and collect the position and attitude information of the navigation unmanned vehicle in real time through the gyroscope and the laser range finder.
[0071] Step S3: According to the data collected by the gyroscope and the laser range finder in real time, determine the road condition information and calc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More