

Gliding missile online closed-loop guidance method based on hp-RPM algorithm
An algorithm and closed-loop technology, applied in the direction of vehicle position/route/height control, control/regulation system, non-electric variable control, etc., can solve the problems of reducing the maximum safe reachable area and limiting system performance, so as to ensure combat performance, The principle is simple and the effect is easy to realize
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
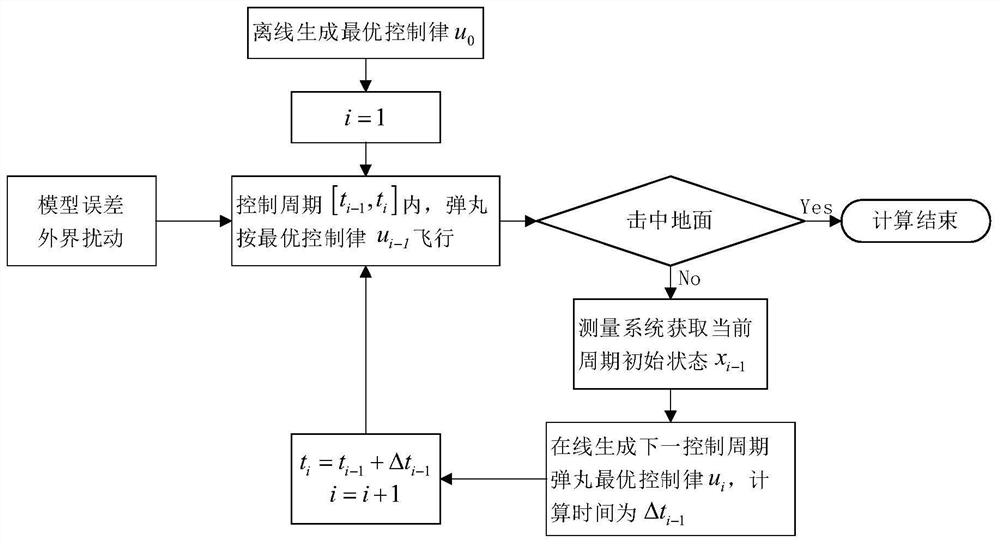
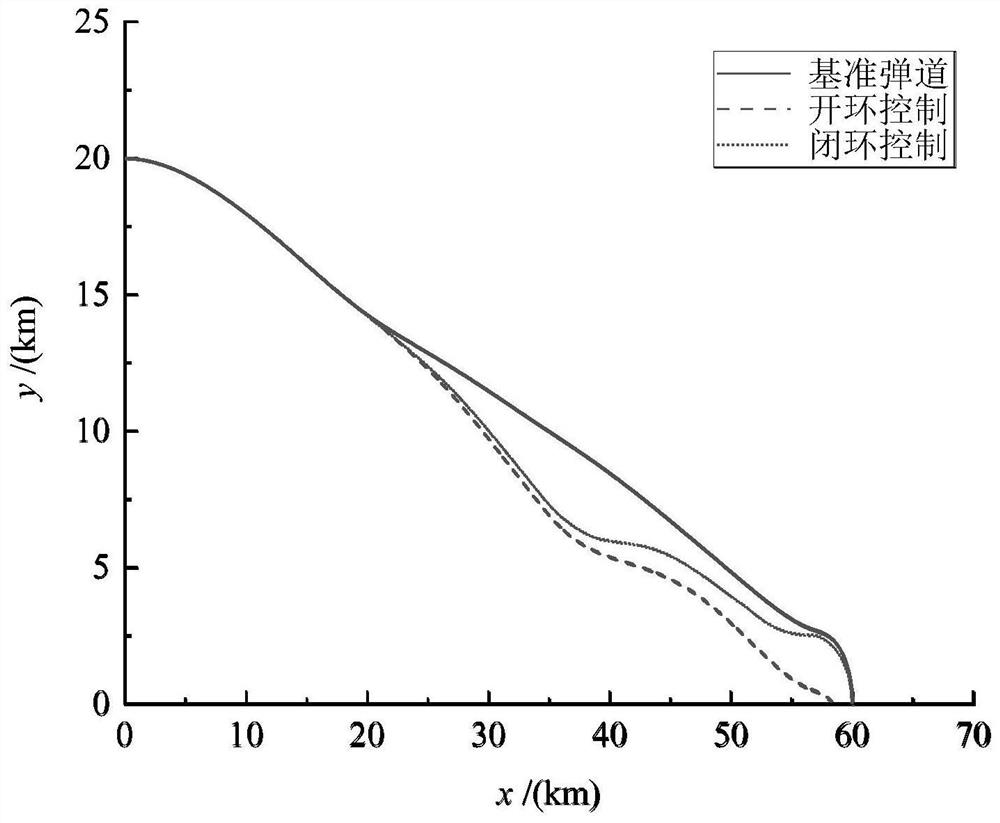
[0068] In the embodiment, it is assumed that the lift coefficient and drag coefficient of the projectile fluctuate by ±10% due to model errors, and the projectile is disturbed by a gust of 0-50m / s when it flies for 50-100s. The open-loop control and the closed-loop guidance method in the present invention are used to carry out simulation experiments respectively. The hardware environment is a Core i7 processor, 16.0GB RAM, the software environment is a 64-bit win10 operating system, and MatlabR2018a software. The experimental results are shown in Figure 3- Figure 6 As shown, the feedback process after combining the examples is:
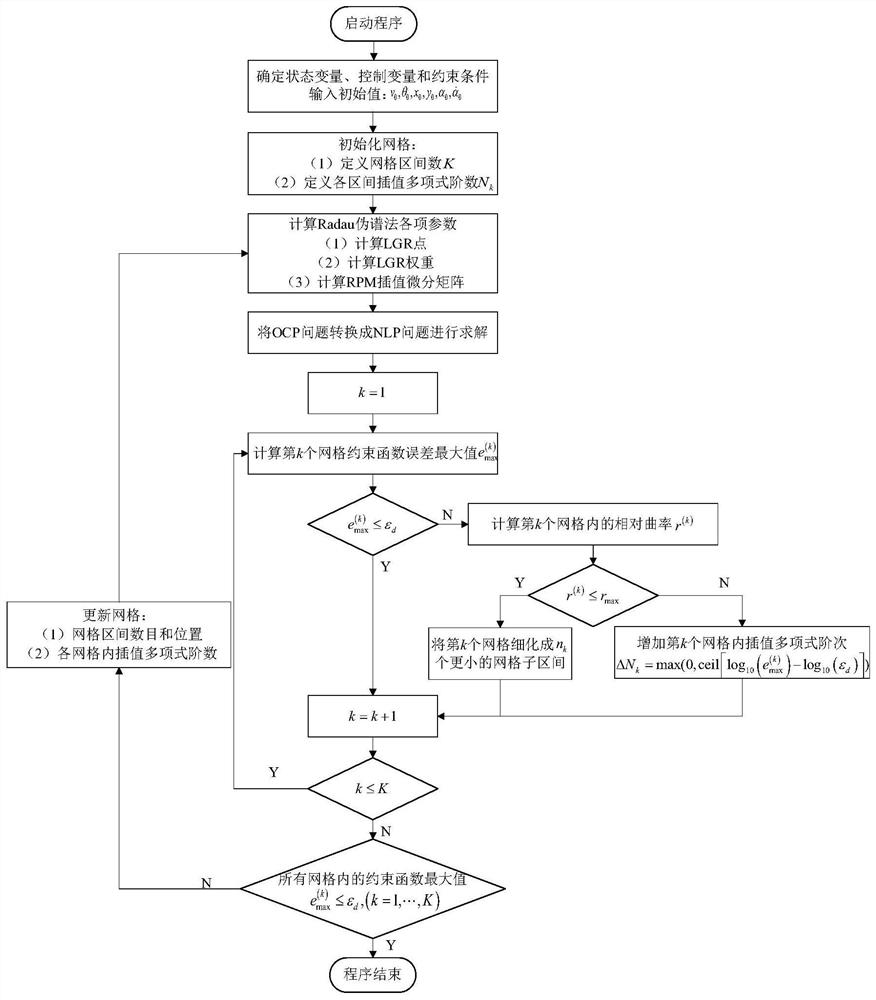
[0069] Step 1: Let t 0 = 0 is the initial moment, determine x 0 =x(t 0 ) is the initial state variable, after selecting the initial iterative grid number and polynomial number of the hp-RPM algorithm, the open-loop optimal control law u is calculated offline 0 .
[0070] Step 2: Suppose t 1 is the first sampling moment of the measurement system,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More