

Picking point detection model construction method and picking point positioning method based on machine vision
A detection model and machine vision technology, applied in the field of artificial intelligence recognition, can solve the problems of low detection accuracy and poor anti-interference performance, and achieve the effect of improving detection efficiency and real-time reconstruction effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Hereinafter, exemplary embodiments according to the present application will be described in detail with reference to the accompanying drawings. Apparently, the described embodiments are only some of the embodiments of the present application, rather than all the embodiments of the present application. It should be understood that the present application is not limited by the exemplary embodiments described here.
[0069] exemplary method
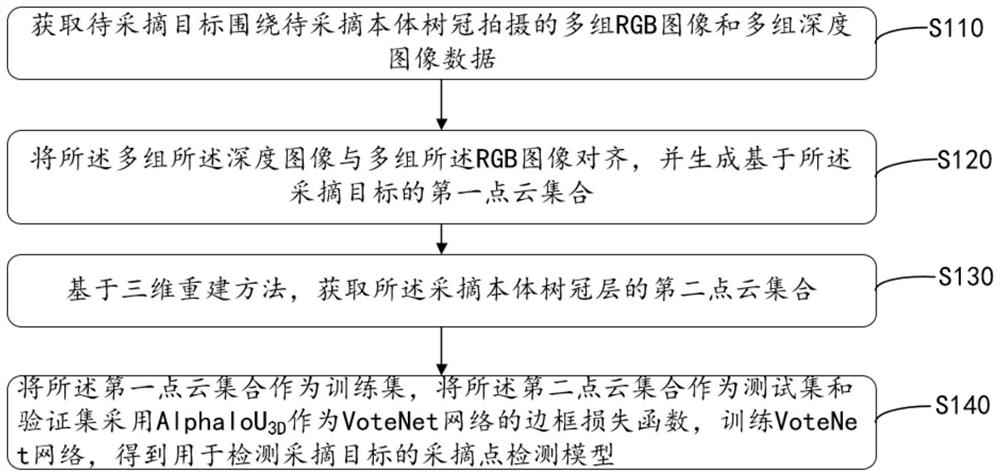
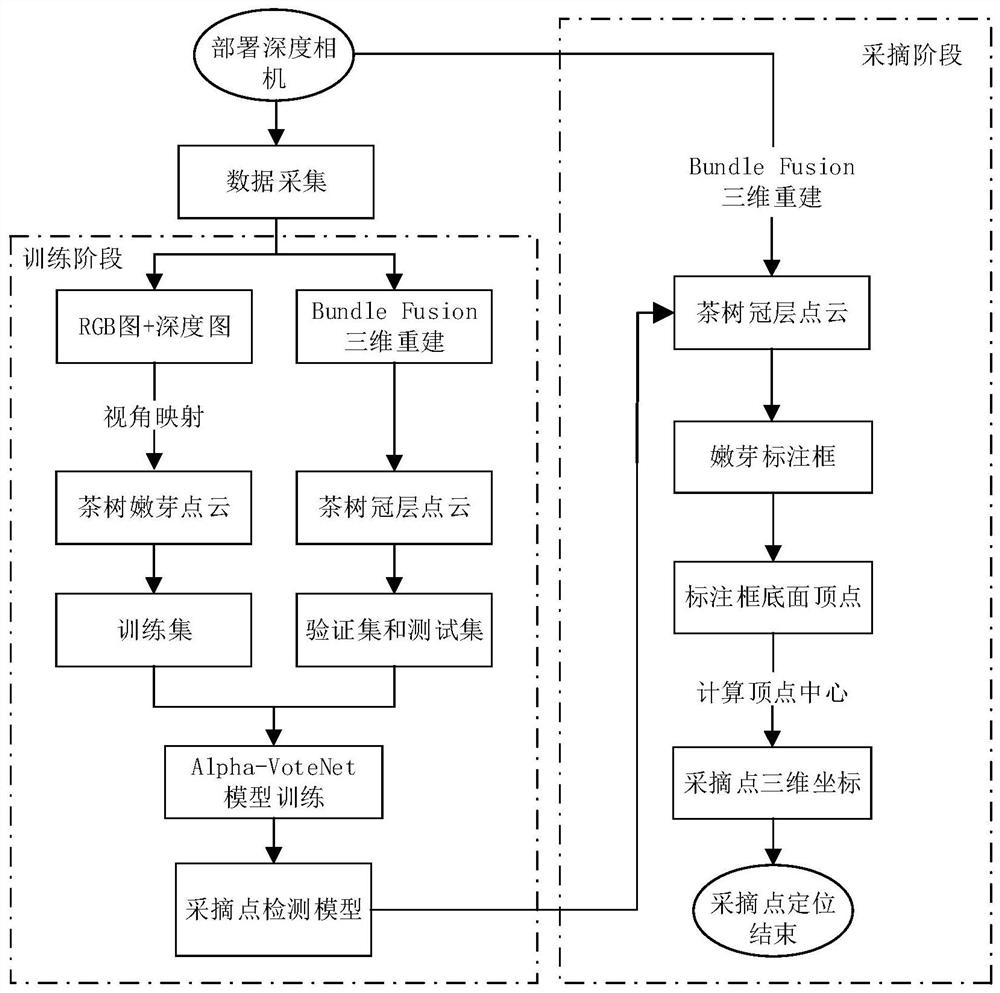
[0070] Such as figure 1 and figure 2 As shown, this example provides a method for building a picking point detection model based on machine vision, including the following steps:
[0071] S110: Obtain multiple sets of RGB images and multiple sets of depth image data of the target to be picked around the canopy of the main body to be picked.
[0072] Specifically, the picking body refers to the tea tree, and the picking target refers to the young buds on the tea tree. Those skilled in the art should understand that the picking bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More