

Remote control operation-modified imported pharynx airway tracheal intubation robot for general anesthesia
A technology of remote control and general anesthesia, which is applied in the direction of tracheal intubation, surgical robots, applications, etc., and can solve the problems of being unsuitable for clinical hospitals, expensive, and long average intubation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings.
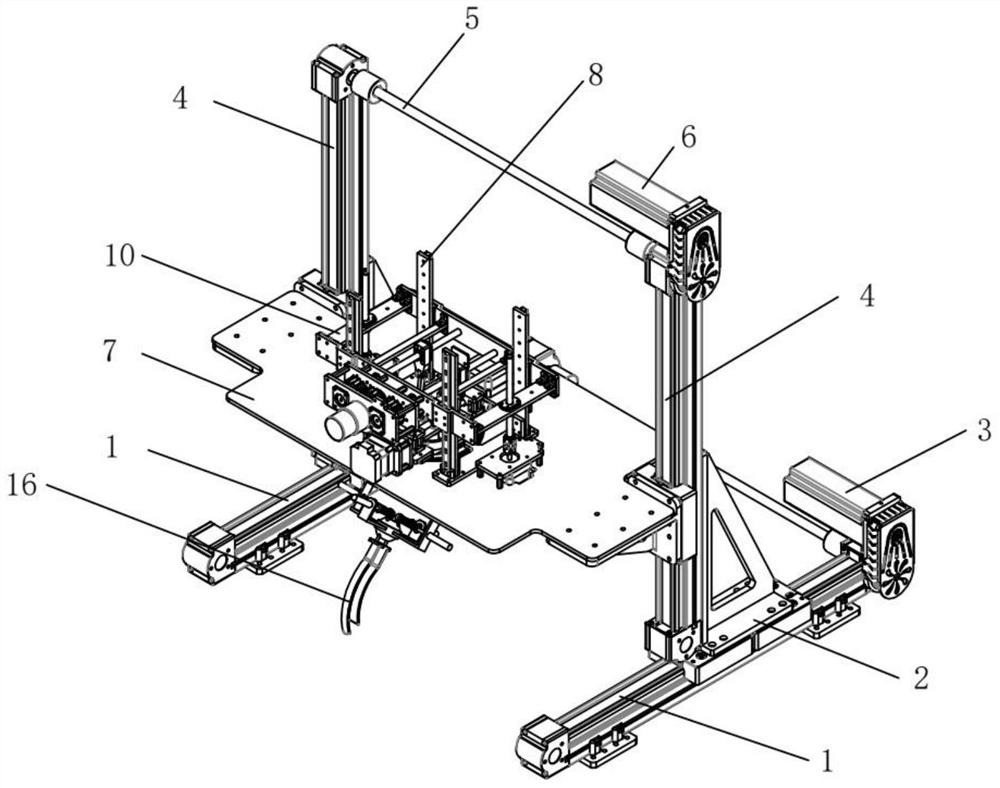
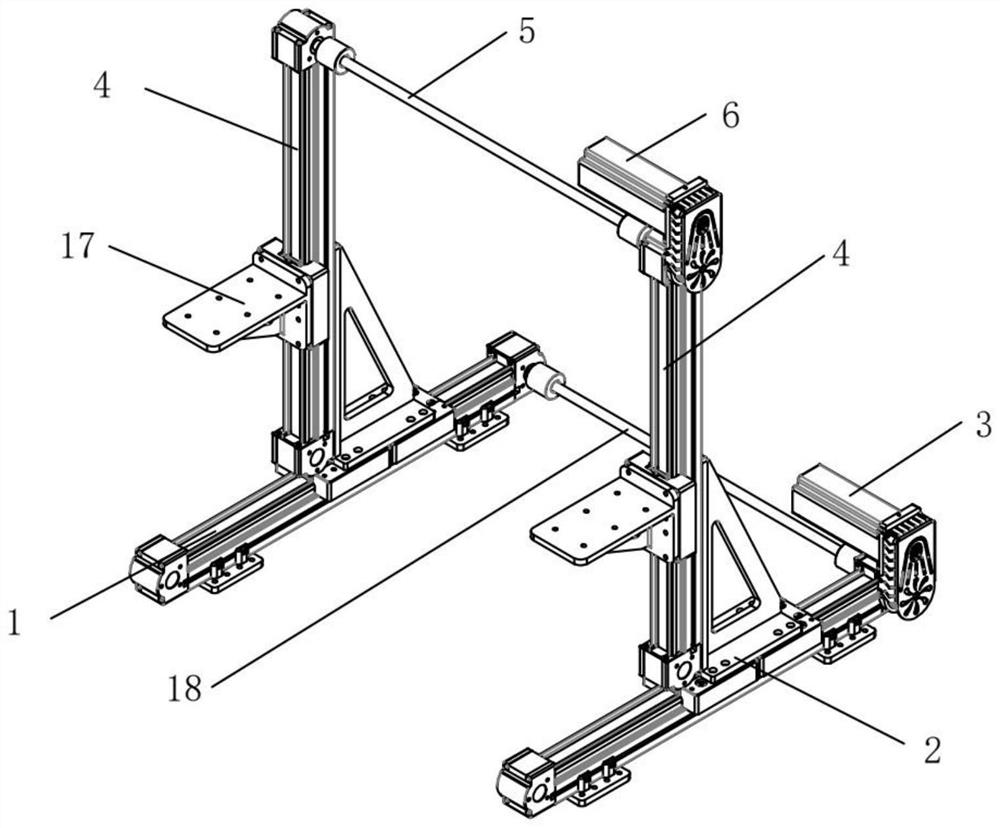
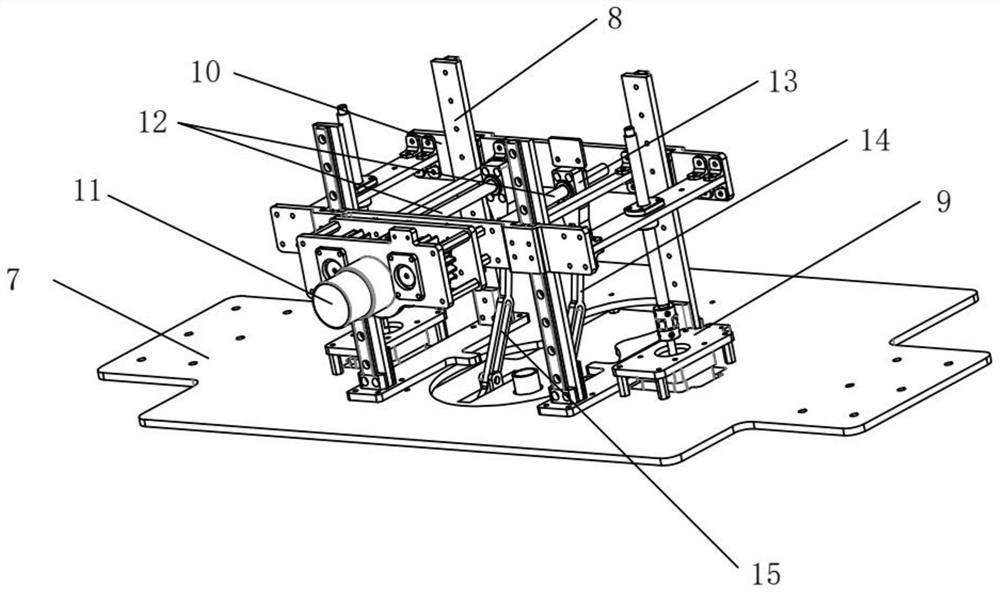
[0023] In order to solve the technical problem of how to automatically control and improve the oropharyngeal airway to complete the guidance of tracheal intubation according to the planned trajectory, the following is combined with the attached Figures 1 to 3 The structure and function of a robot for general anesthesia using remote control to improve oropharyngeal airway tracheal intubation are described in detail;
[0024] An improved oropharyngeal airway endotracheal intubation robot with remote control operation for general anesthesia, including an active support and a tongue depressor posture adjustment mechanism;
[0025] The tongue depressor posture adjustment mechanism replaces the laryngoscope to provoke the epiglottis, which can lift the base of the tongue that falls back to open the oropharyngeal space, and lift the epiglottis so that the opening o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More