

Redundant mechanical arm real-time look-ahead trajectory planning method based on NURBS curve interpolation algorithm
A technology of curve interpolation and trajectory planning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of joint variable saturation, collision, and deviation of the end effector of the manipulator from the desired trajectory, achieving simple algorithm and high calculation efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
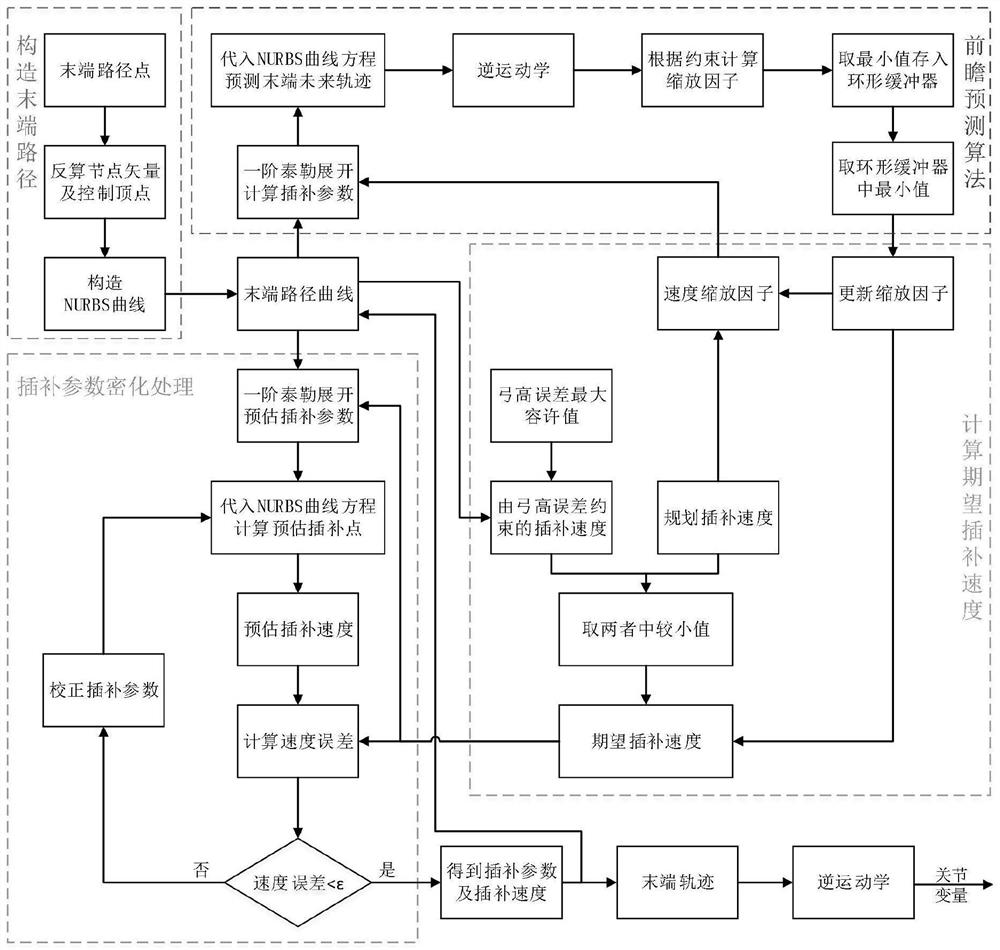
[0058] The real-time forward-looking trajectory planning method of the redundant manipulator based on the NURBS curve interpolation algorithm of the present invention first constructs the NURBS parameter curve as the end expected path according to the given target path point at the end of the manipulator; then uses the estimation and correction method to realize the NURBS curve The desired trajectory is obtained by interpolation; then the joint variables are solved through the closed-loop inverse kinematics control algorithm, and the joint limit is realized by using the redundant characteristics. The expected interpolation speed of the end effector is firstly planned through the acceleration and deceleration control algorithm; then the interpolation speed is limited according to the bow height error in Cartesian space to improve the interpolation accuracy; then the forward-looking algorithm is introduced to consider the joint speed of the manipulator, The acceleration constrain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More