

Unmanned aerial vehicle positioning method capable of covering signals of agriculture and forestry robot
A positioning method and UAV technology, applied in the field of information processing, can solve the problems of robot anti-collision and signal loss, and achieve the effect of ensuring real-time performance and high altitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
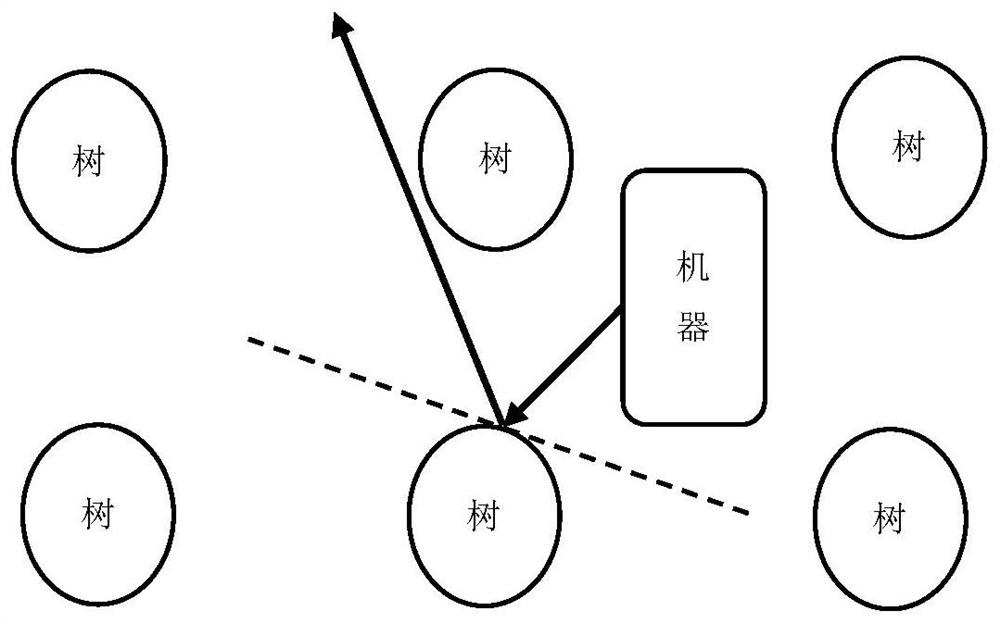
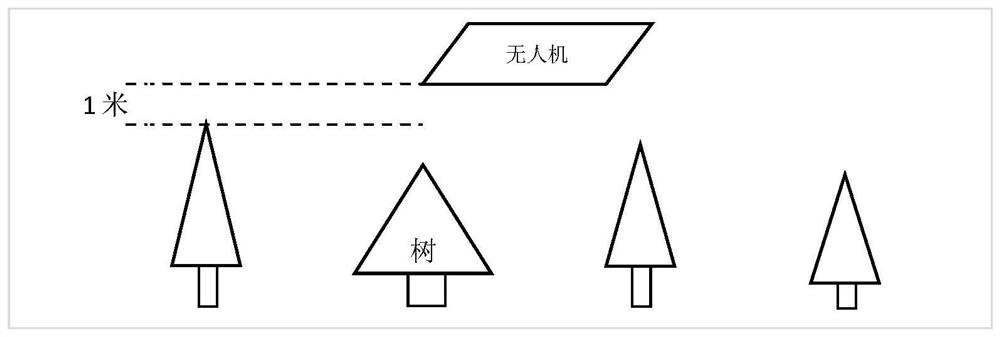
[0058] see Figure 1 to Figure 4 As shown, the UAV positioning method based on optimization technology that can cover the signals of agricultural and forestry robots, the hardware that the method relies on includes an unmanned aerial vehicle and multiple agricultural and forestry robots M, and the UAV is equipped with an airborne base station, Utilize described airborne base station to described agriculture and forestry robot M supplementary signal, the distance measurement unit utilized in described method is meter, and time unit is minute, the unmanned aerial vehicle positioning optimization model that can cover agriculture and forestry robot signal is set up below:
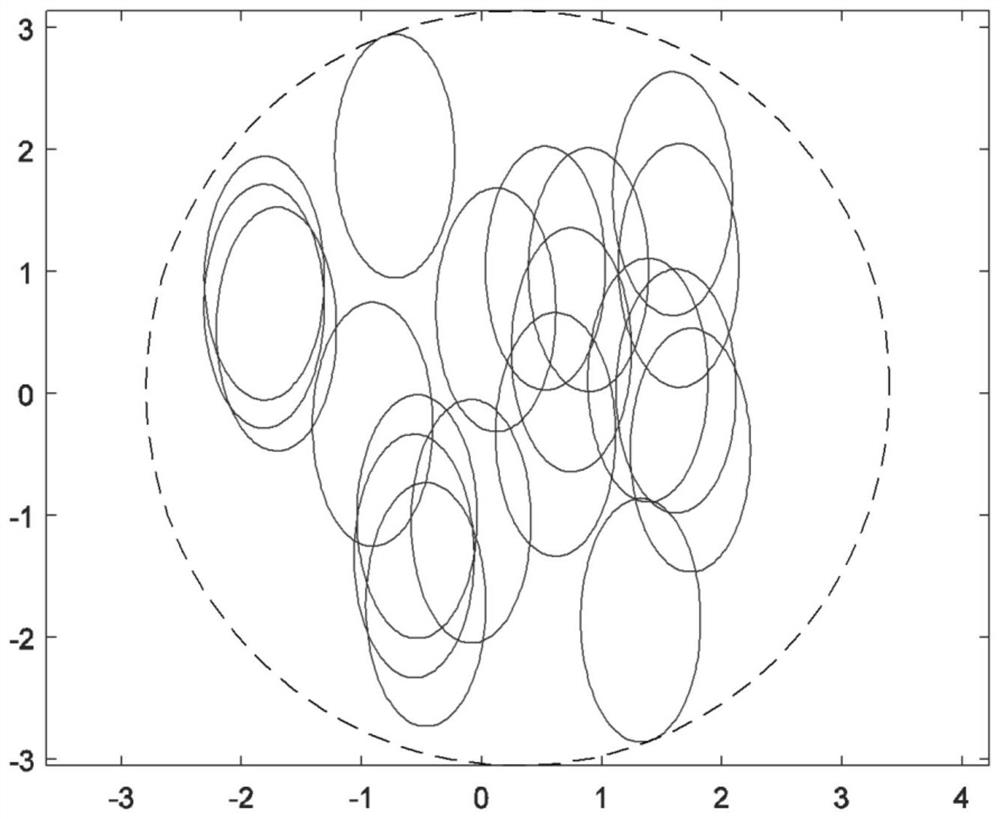
[0059] The activity range of the i-th agricultural and forestry robot Mi is defined as an elliptical area, denoted as E i , i is a positive integer, and its major axis is Minor axis is with E i The center of the position is the origin of the coordinates, and the north-south direction is the vertical axis. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More