Multi-legged robot kinematics parameter calibration method based on vision
A technology of robot kinematics and multi-legged robots, applied in the field of robotics, can solve the problems of uncalibration and susceptibility to foot slipping, etc., and achieve the effect of improving walking effect, low cost, and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The multi-legged robot of the present invention includes a fuselage and at least two legs, each leg contains at least two joints connected in series, and the number of different legs is applicable to the method of this application. The fuselage is rectangular, and each leg is distributed on four sides of the rectangular fuselage. For example, for a quadruped robot, one leg is provided at each of the two ends of the two sides on the axial sides of the rectangular body. For the 6-legged robot, one leg is respectively arranged at the two ends and the middle position of the two sides of the axial two sides of the rectangular body.
[0043] In the following embodiments, a hexapod robot with each leg including three joints is taken as an example.
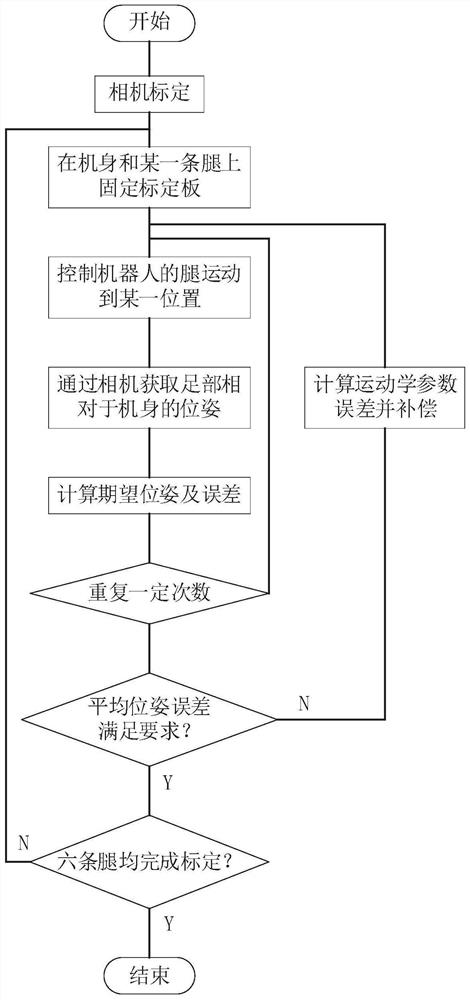
[0044] Such as figure 1 Shown is the flow chart of the calibration of the kinematics parameters of the hexapod robot in this application.
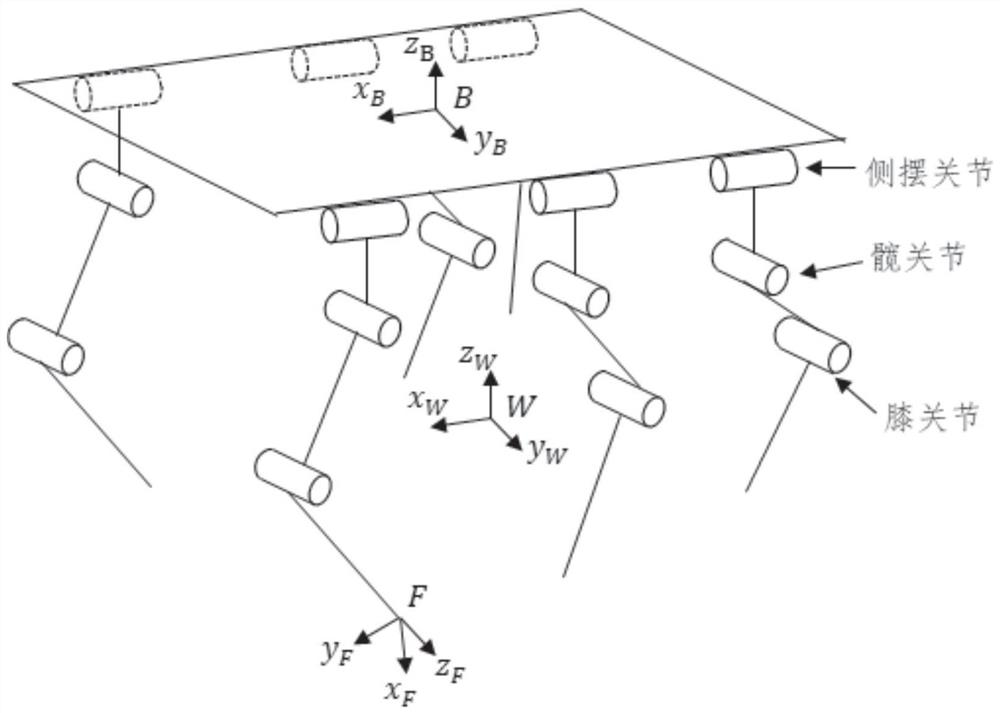
[0045] Such as figure 2As shown, the hexapod robot described in this embodiment includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More