

An Active Compensation Method for Somatosensory Micro-low Gravity Simulator
An active compensation and simulation device technology, applied in the aerospace field, can solve the problems of large gravitational moment, frictional moment and inertial moment, and achieve the effect of low cost, high accuracy and good safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
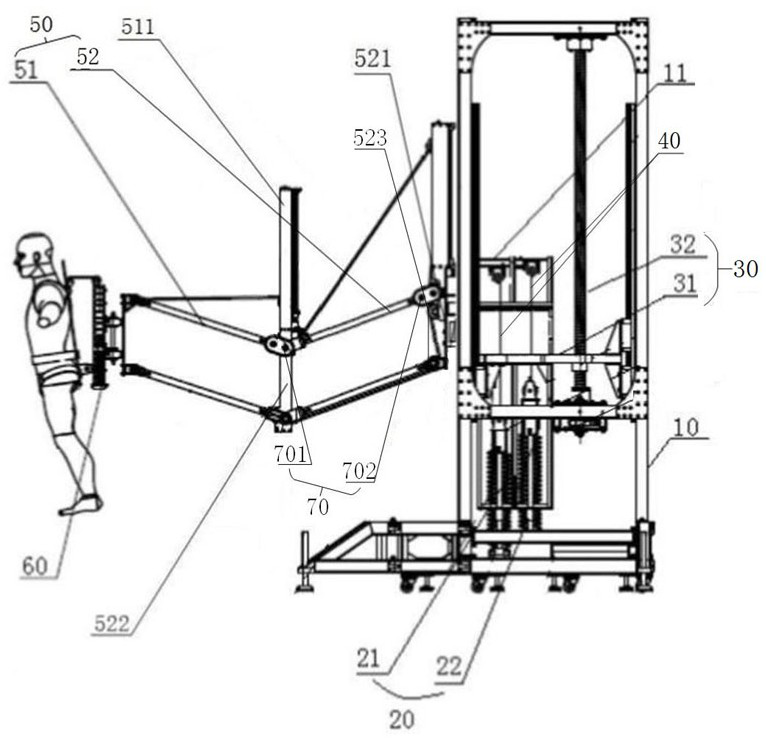
[0112] Such as figure 1 As shown, the present embodiment provides a somatosensory low-gravity simulation device, which includes a support frame 10 , an adjustment assembly 30 , a buffer assembly 20 , a gravity balance assembly 50 and a man-machine interface 60 . The support frame 10 is fixed on the floor, and the adjustment assembly 30 and the buffer assembly 20 are arranged in the support frame 10. The bottom of the buffer assembly 20 and the bottom of the adjustment assembly 30 are fixedly connected with the bottom of the support frame 10 respectively, and one end of the gravity balance assembly 50 is connected to the bottom of the support frame 10. The outer sidewall of the adjustment assembly 30 is fixedly connected to the top of the buffer assembly 20 , and the other end of the gravity balance assembly 50 is fixedly connected to the man-machine interface 60 .
[0113] Preferably, the gravity balance assembly 50 is balanced by the elastic potential energy provided by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More