

Autonomous underwater robot propeller weak fault feature extraction method
An underwater robot, fault feature technology, applied in the direction of instruments, computer parts, character and pattern recognition, etc., can solve problems such as small fault degree and hard fault output loss degree of thrusters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
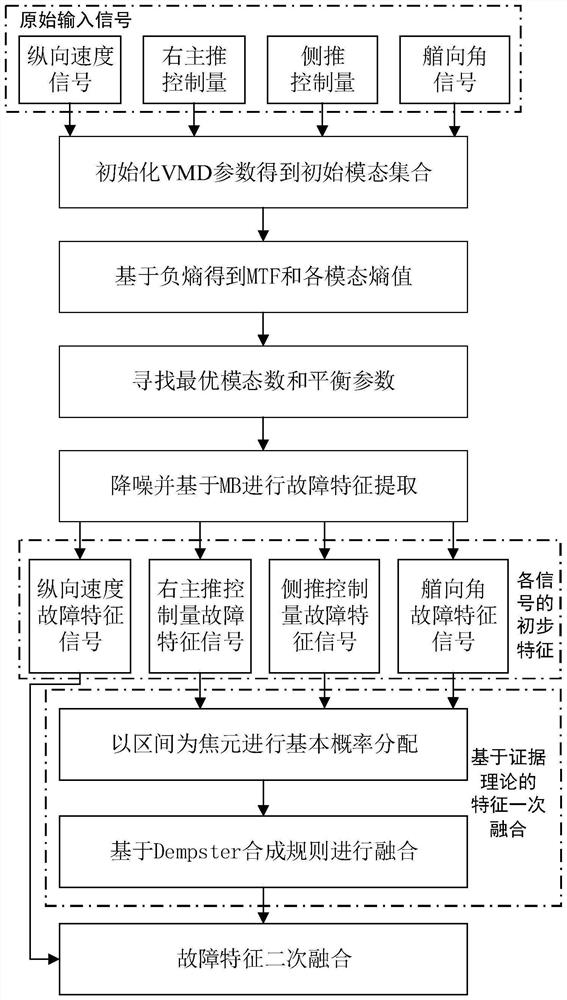
[0053] figure 1 The flow chart of the AUV fault feature extraction method patented by the present invention. combine figure 1 , the specific implementation steps of the weak fault feature extraction method for autonomous underwater robot thrusters based on multi-source state signals and control signals are as follows:
[0054] Step 1: Initialize the mode number, center frequency and balance parameters of the variational mode decomposition (VMD), and perform VMD to obtain the initial mode set. This step is the same as the conventional MVMD method.
[0055] Step 2: Obtain the improved optimization evaluation function (MTF) and the entropy value of each mode based on negative entropy.
[0056] In this step, the patent uses a negative entropy method to obtain the entropy value of each mode, and obtains an improved optimization evaluat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More