First-order linear active disturbance rejection control system and parameter setting method thereof
A linear self-disturbance rejection and parameter tuning technology, applied in the field of automation, can solve the problems of too many tuning parameters, cumbersome parameter tuning methods, lack of other problems, and achieve the effect of simplifying the parameter tuning process and shortening the parameter tuning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
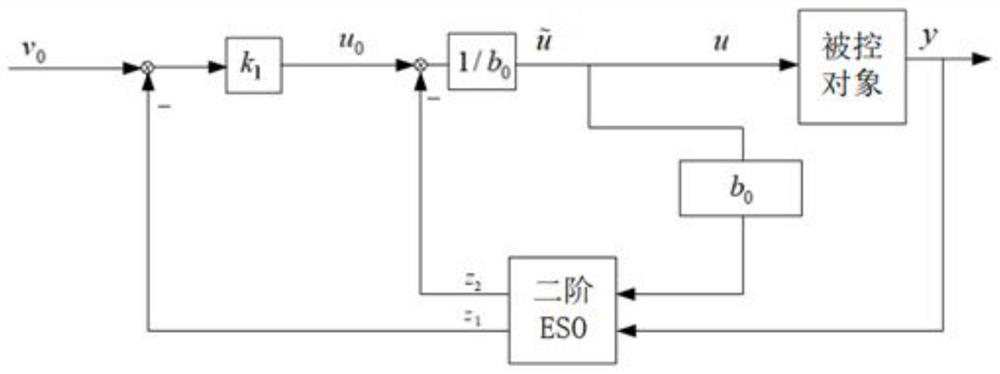
[0063] A first-order linear active disturbance rejection control system in this example, such as figure 1 As shown, including the controlled object and the first-order linear ADRC controller, the first-order linear ADRC controller includes the extended state observer, the linear error feedback control law and the ADRC total disturbance compensation law.
[0064] Define the bandwidth ω of the linear error feedback law c with the bandwidth of the expanded state observer ω 0 The ratio is λ,
[0065] Define the bandwidth of the first-order linear active disturbance rejection controller as ω A ,make
[0066] Then the error feedback control law bandwidth ω c =(1+2λ)ω A ;
[0067] Extended State Observer Bandwidth
Embodiment 2
[0069] The further design of this example is: in this example, the expression of the extended state observer is:
[0070]
[0071] In the formula, u is the input of the controlled object; y is the output of the controlled object; z i is the output of the extended state observer, i=1, 2;
[0072] in,
[0073] ω 0 is the bandwidth of the expanded state observer; b 0 is the control gain of the extended state observer; β i is the parameter of the extended state observer, i=1, 2,
[0074] The expression of the linear error feedback control law is: u 0 =k 1 (v 0 -z 1 );
[0075] In the formula, v 0 is the set value; k 1 is the parameter of the linear error feedback control law, k 1 = ω c =(1+2λ)ω A ; c is the bandwidth of the linear error feedback law;
[0076] The expression of ADRC total disturbance compensation law is: u=(u 0 -z 2 ) / b 0 .
Embodiment 3
[0078] A parameter tuning method of a first-order linear active disturbance rejection control system in this example includes the following steps:
[0079] 1) Control logic configuration on the control system of the controlled object based on the linear first-order active disturbance rejection controller; including defining the bandwidth ω of the linear error feedback law c with the bandwidth of the expanded state observer ω 0 The ratio of λ and the bandwidth of the first-order linear active disturbance rejection controller is ω A ,in, Then ω c =(1+2λ)ω A , The control system of the controlled object includes DCS system and PLC system.
[0080] 2) Obtain the steady-state gain K, inertia time T and delay time τ of the controlled object, and further obtain the value of λ, the control variable gain b of the extended state observer 0 and the bandwidth ω of the first-order linear active disturbance rejection controller A ;
[0081] 3) Calculate the parameter β of the exte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More