

Automatic driving vehicle trajectory tracking system and method based on neural network dynamics model
A neural network model and dynamic model technology, applied in biological neural network models, neural learning methods, constraint-based CAD, etc., can solve the problem that cannot meet the actual needs of high-level autonomous driving of intelligent vehicles, and the vehicle dynamics model cannot be fully Considering the vertical and horizontal coupling relationship of tires, large trajectory tracking error, etc., to achieve the effect of taking into account the horizontal and vertical stability, ensuring the path tracking accuracy, and reducing the calculation cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0091] The present invention will be further described below in conjunction with the accompanying drawings.
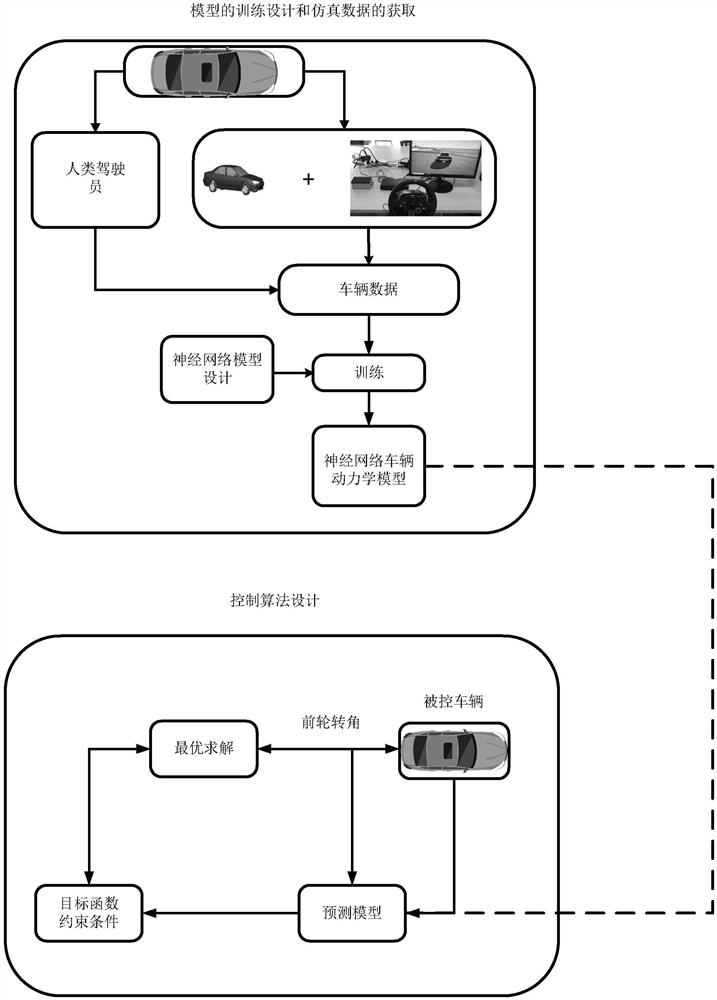
[0092] figure 1 The flow chart of intelligent vehicle trajectory tracking algorithm based on neural network vehicle dynamics model predictive control, including model training and trajectory tracking based on model predictive control, is as follows:
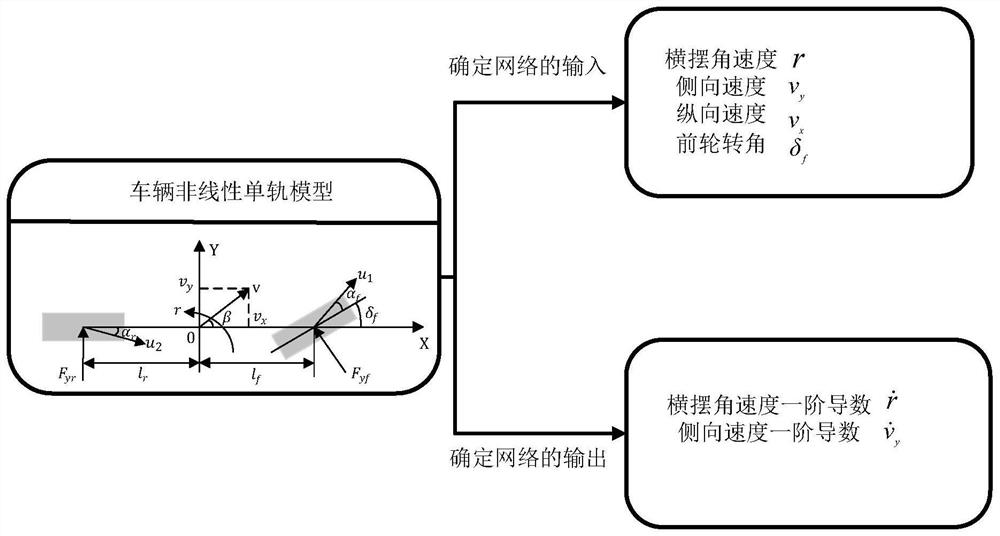
[0093] Model training: The process of acquiring data from the driving simulator and the CarSim simulation platform and acquiring the real vehicle data. The vehicle dynamics prediction model is designed based on the feedforward neural network and the model is trained with the obtained data.
[0094] Trajectory tracking based on model predictive control: The model predictive control algorithm is designed by using the trained neural network vehicle dynamics model, and the optimal front wheel angle is obtained through the online solution of rolling optimization, so as to realize the tracking control of the reference trajecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More