

Road scene point cloud classification method and storage medium
A technology of cloud classification and scene points, applied in instruments, biological neural network models, computing, etc., can solve problems such as low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
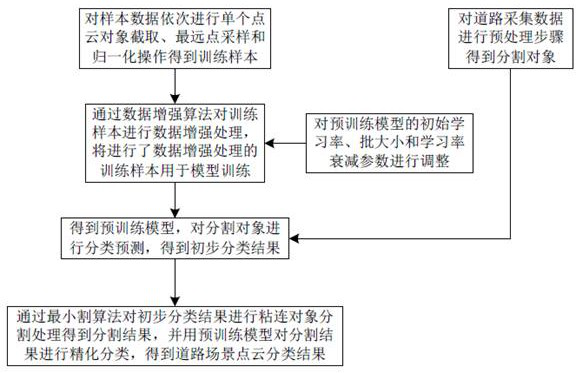
[0055] Road scene point cloud classification methods, such as figure 1 shown, including the following steps:
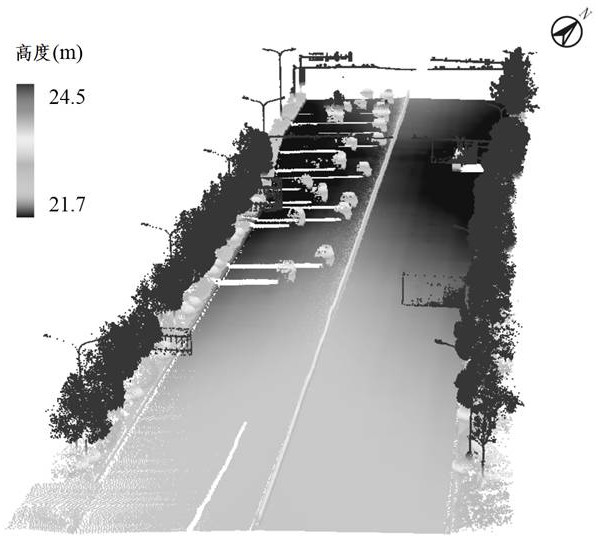
[0056] Step 1. Obtain sample data and road collection data. The sample data collects data on the roads of Wuhan Optics Valley Third Ring Road through the existing vehicle-mounted LiDAR system. Carry out data collection, road collection data such as figure 2 As shown; the sample data is sequentially intercepted from a single point cloud object, the farthest point is sampled and normalized to obtain a training sample, and the road collection data is preprocessed to obtain a segmented object.
[0057] The preprocessing operation includes the following substeps:
[0058] In sub-step 1.1, the ground points and non-ground points are first separated from the road collection data by a preset filtering algorithm. The preset filtering algorithm is the existing cloth filtering algorithm or ground filtering algorithm.
[0059] Sub-step 1.2, and then cluster the non-ground poi...
Embodiment 2
[0080] The difference between the road scene point cloud classification method and Embodiment 1 is that it also includes step 5, identifying the target types of the point cloud classification results on both sides of the road in step 4 including railings, low sidewalk plants, light poles, and high sidewalk plants, and judging Whether the target type is the preset type, which can be railing or low street plant.
[0081] When the target type is a preset type, identify the position information at the center of the target type. The position information is identified based on the coordinate data of the collected point cloud to determine whether the position information is located on both sides of the road. When the position information is located on both sides of the road , calculate the target width according to the position information at the center of gravity of the target type on both sides of the road.
[0082] The distance difference is obtained by making a difference between...
Embodiment 3
[0085] This embodiment provides a storage medium, and the storage medium is used for storing computer-executable instructions. When the computer-executable instructions are executed, the steps of the methods for classifying road scene point clouds in Embodiment 1 and Embodiment 2 are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More