

Relative positioning method based on MAP noise improvement
A relative positioning and noise technology, applied in satellite radio beacon positioning systems, instruments, measuring devices, etc., can solve the problems of cumbersome calculations in the extended Kalman filter method, improve self-adaptive ability, overcome cumbersome calculations, and improve real-time performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
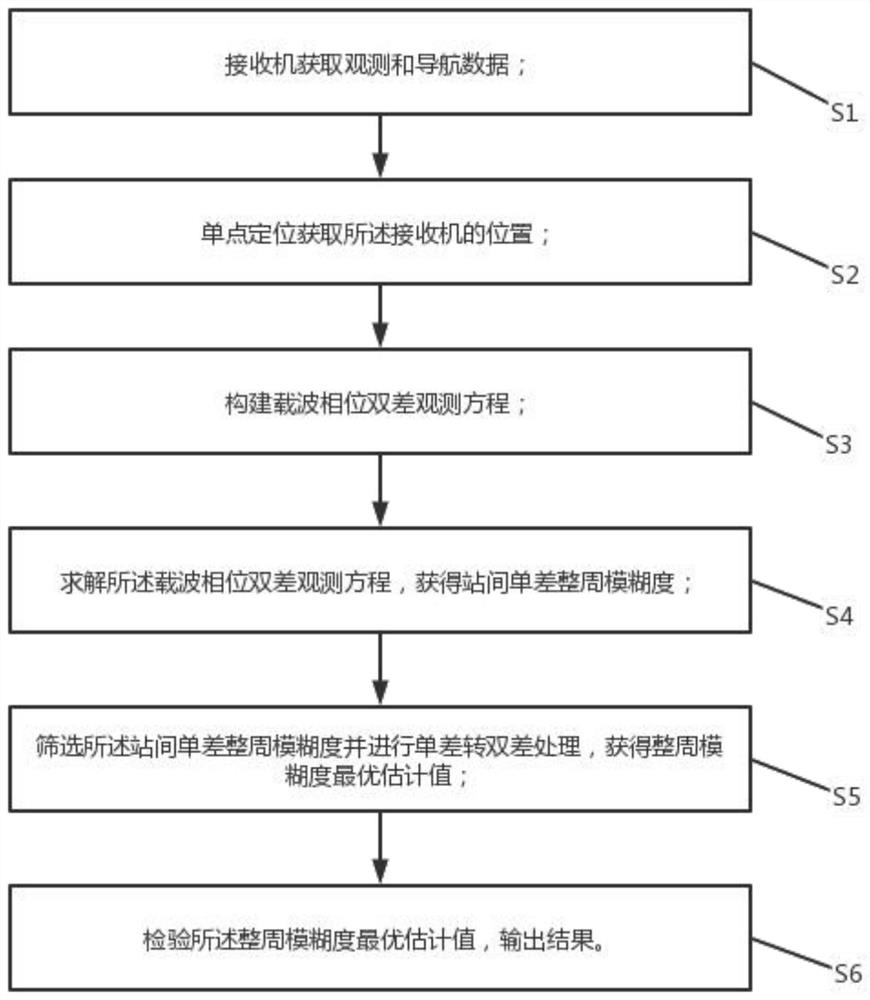
[0036] see figure 1 , the present invention proposes a relative positioning method based on MAP noise improvement, comprising the following steps:
[0037] S1: The receiver acquires observation and navigation data;
[0038] S2: single-point positioning to obtain the position of the receiver;
[0039] S3: Construct the carrier phase double-difference observation equation;
[0040] S4: Solve the carrier phase double-difference observation equation to obtain the single-difference integer ambiguity between stations;
[0041] S5: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More