

Picking end effector for reducing damage to plants and fruits
A technology for end effectors and fruits, which is applied in the direction of picking machines, agricultural machinery and implements, chucks, etc., and can solve problems such as damage, irreparable target fruit, and inability to reduce small synchronous pulleys and synchronous belt stems and leaves.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments and illustrations.
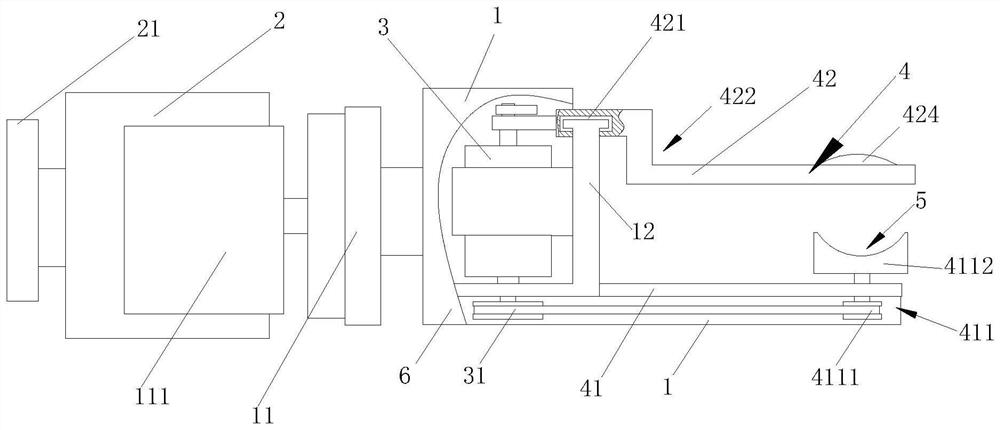
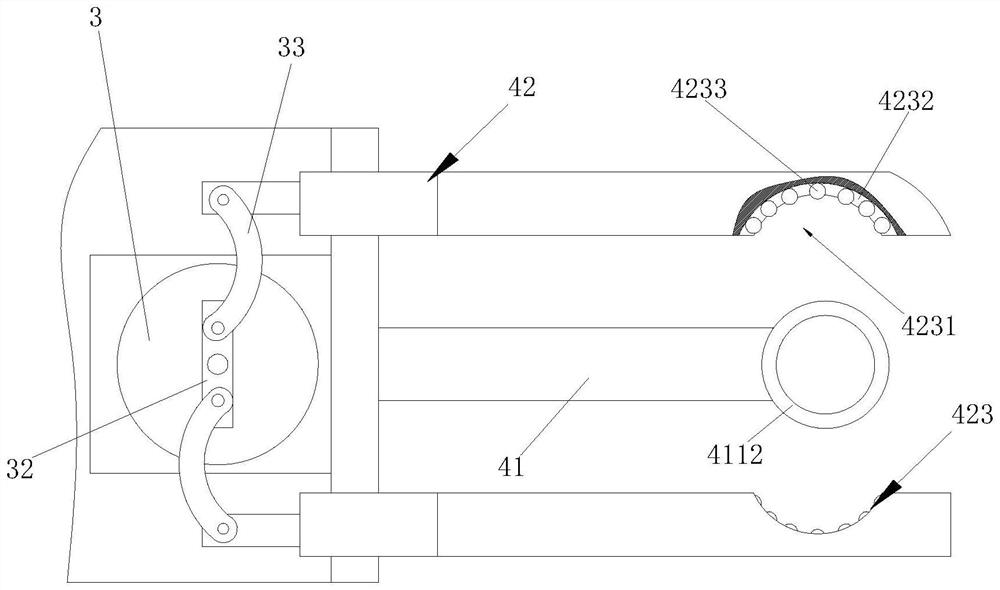
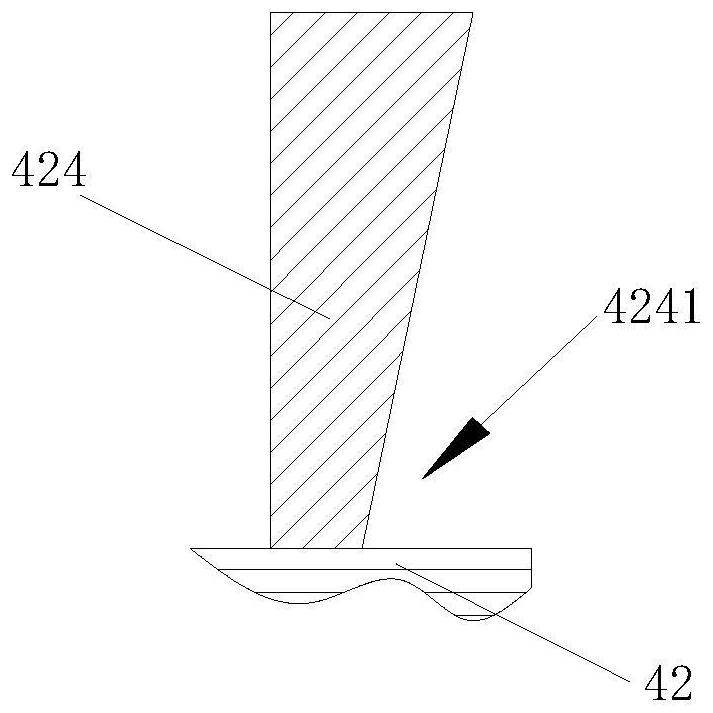
[0020] Such as figure 1 , figure 2 , image 3 with Figure 4As shown, the picking end effector for reducing plant and fruit damage includes a base 1 and a motor base 2, the motor base 2 is located at the left end of the base 1, and also includes a double output motor 3 and a clamping device 4 , the double-output motor 3 is installed in the base 1 through a connecting sleeve, the output shaft of the double-output motor 3 is vertically arranged, the clamping device 4 is located at the right end of the base 1, and the lower end of the double-output motor 3 is The output shaft of the output shaft is equipped with a large synchronous pulley 31, the clamping device 4 includes a lower jaw 41 and an upper jaw 42, the right end o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More