

Soft robot system based on pneumatic muscles and ropes
A robotic system, pneumatic muscle technology, applied in the field of robotics, can solve problems such as the limitation of robot movement degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
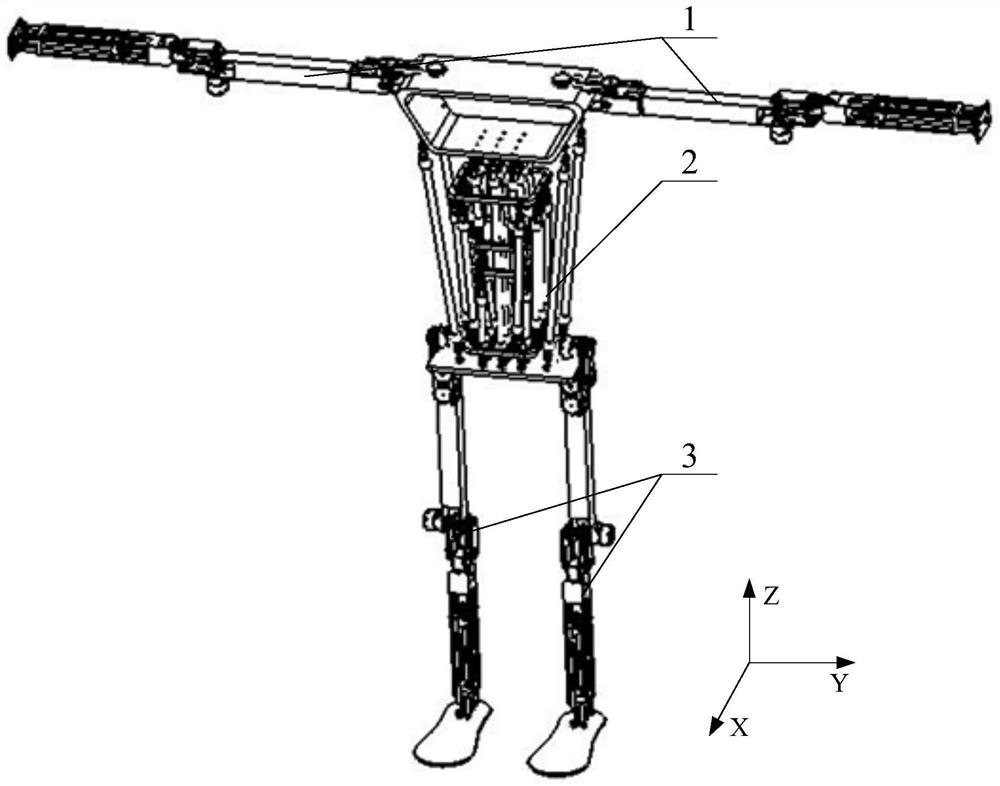
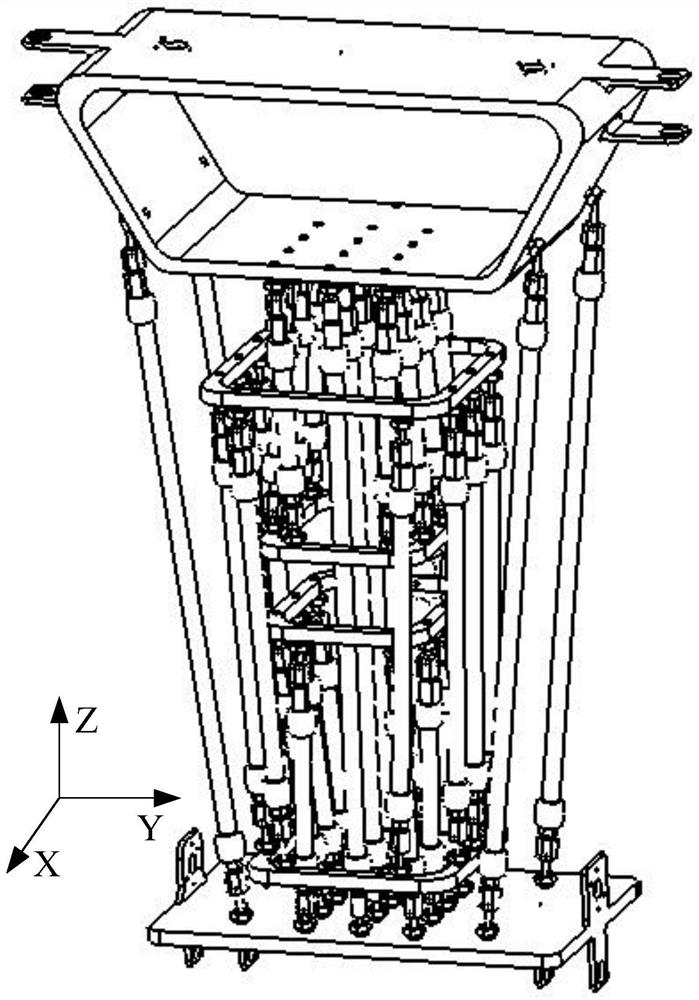
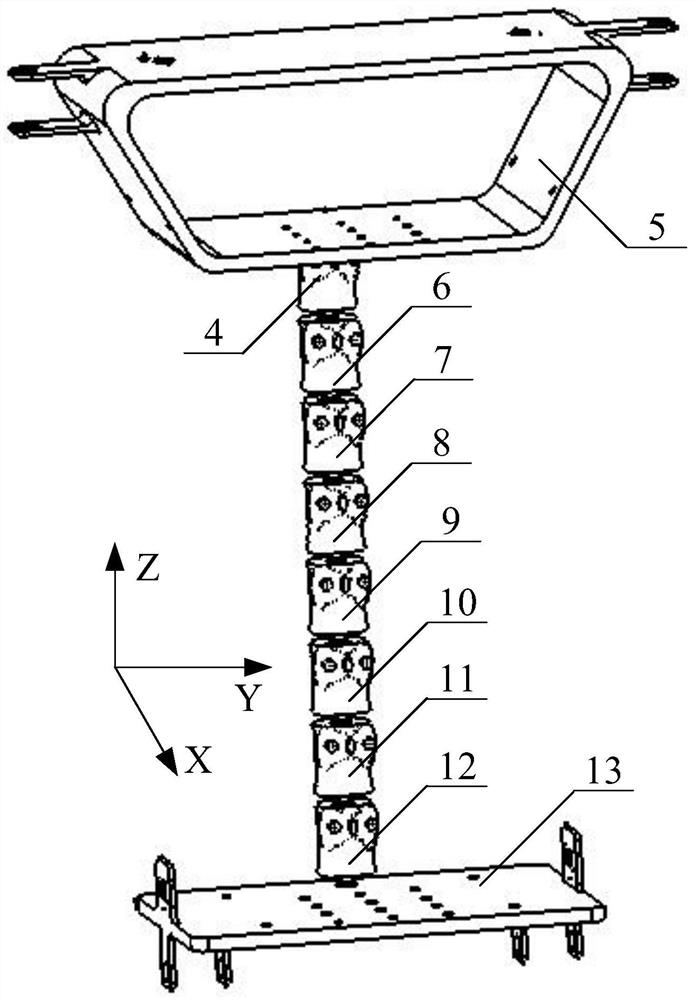
[0042] A soft robot system based on pneumatic muscles and ropes, including: upper limb joint 1, waist joint 2, lower limb joint 3, left lower limb 3-1, right lower limb 3-2, vertebra one 4, chest connector 5, vertebra two 6 , vertebra three 7, vertebra four 8, vertebra five 9, vertebra six 10, vertebra seven 11, vertebra eight 12, waist connector 13, first rib layer 14, rib second layer 15, rib third layer 16, rib third layer Fourth floor 17, long aerodynamic muscle 1 18, long aerodynamic muscle 2 19, long aerodynamic muscle 3 20, long aerodynamic muscle 4 21, long aerodynamic muscle 5 22, long aerodynamic muscle 6 23, long aerodynamic muscle 7 24, long aerodynamic muscle 8 25. Middle pneumatic muscle 1 26, medium pneumatic muscle 2 27, medium pneumatic muscle 3 28, medium pneumatic muscle 4 29, medium pneumatic muscle 5 30, medium pneumatic mu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More