

Vision-based unmanned aerial vehicle landing attitude estimation method
An attitude estimation and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems that satellite navigation systems are susceptible to interference and do not meet the performance requirements of fine-grained navigation tasks.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
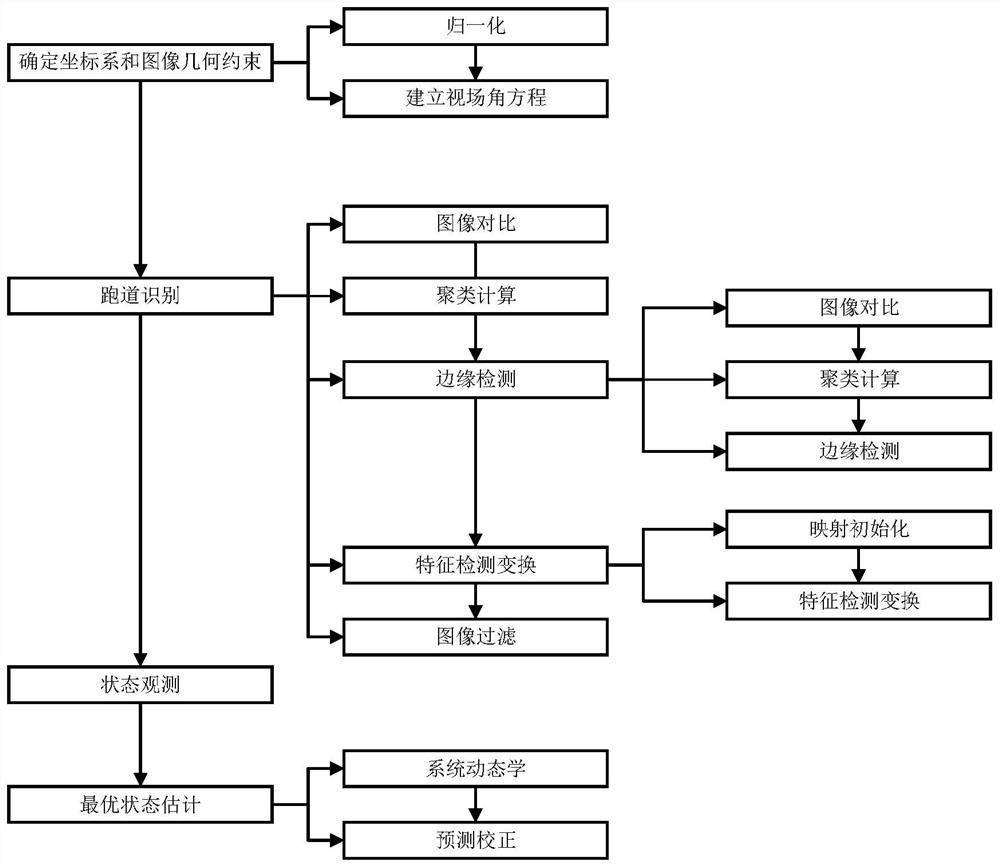
[0039] A vision-based approach to UAV landing attitude estimation, which is used to augment or support satellite navigation systems as the primary means of navigation during UAV landing, using clustering techniques to identify runway markings, using edge detectors and features Detect transformations to verify that markers are located on recovery targets, use optimizers to match detected markers to coordinates in 3D space, use nonlinear transformation and projection solvers to view camera position and orientation, use extended Kalman filtering to improve pose estimation.
[0040] The proposed algorithm of this method gives better pose estimation than existing vision systems.
[0041] The method includes:
[0042] Step 1. Determine the coordinate system and image geometric constraints,
[0043] Control the field of view or zoom of the onboard camera. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More