

Robot control method and system based on gesture distribution template action recognition
A technology of motion recognition and control method, applied in the field of pattern recognition, can solve problems such as inaccurate gesture recognition results, easy recognition of wrong results, etc., and achieve the effect of improving robustness, accuracy, and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The application will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present application.
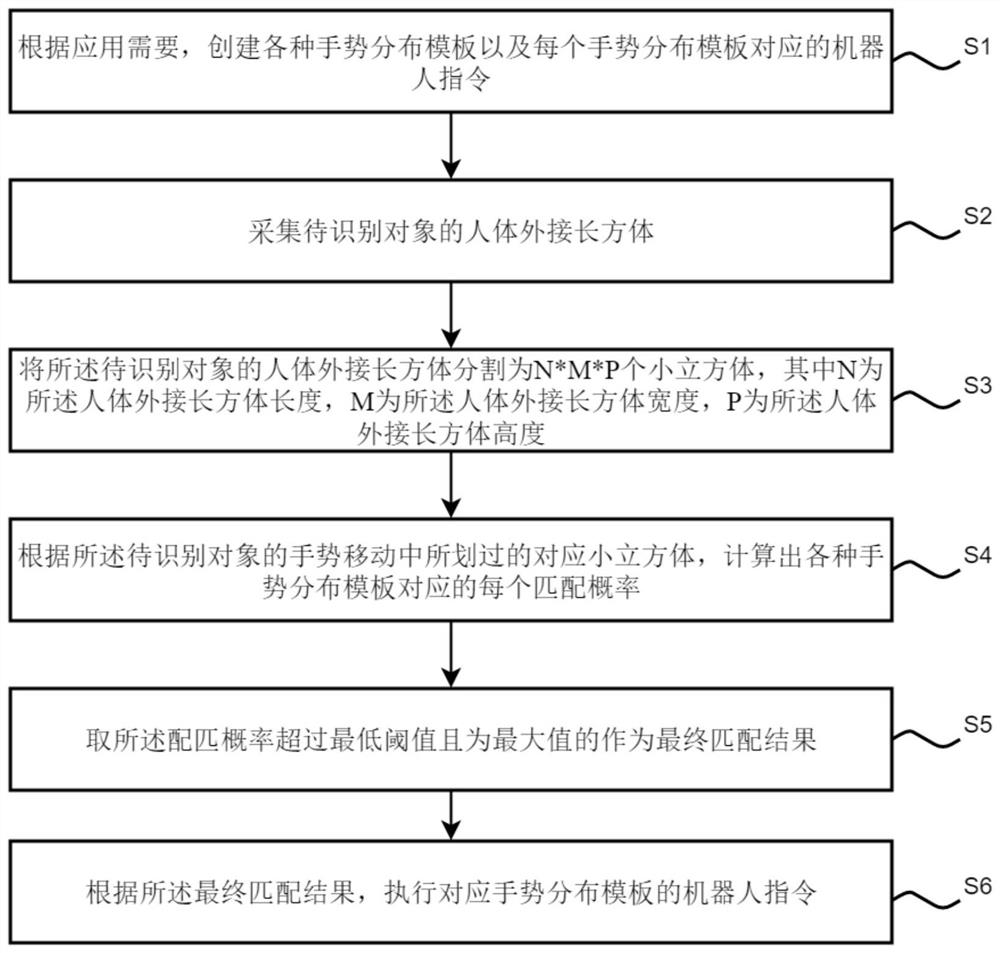
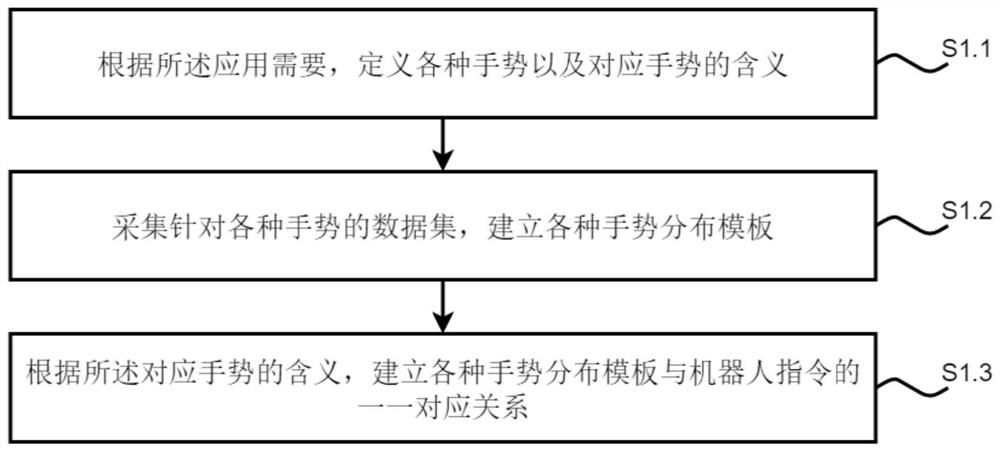
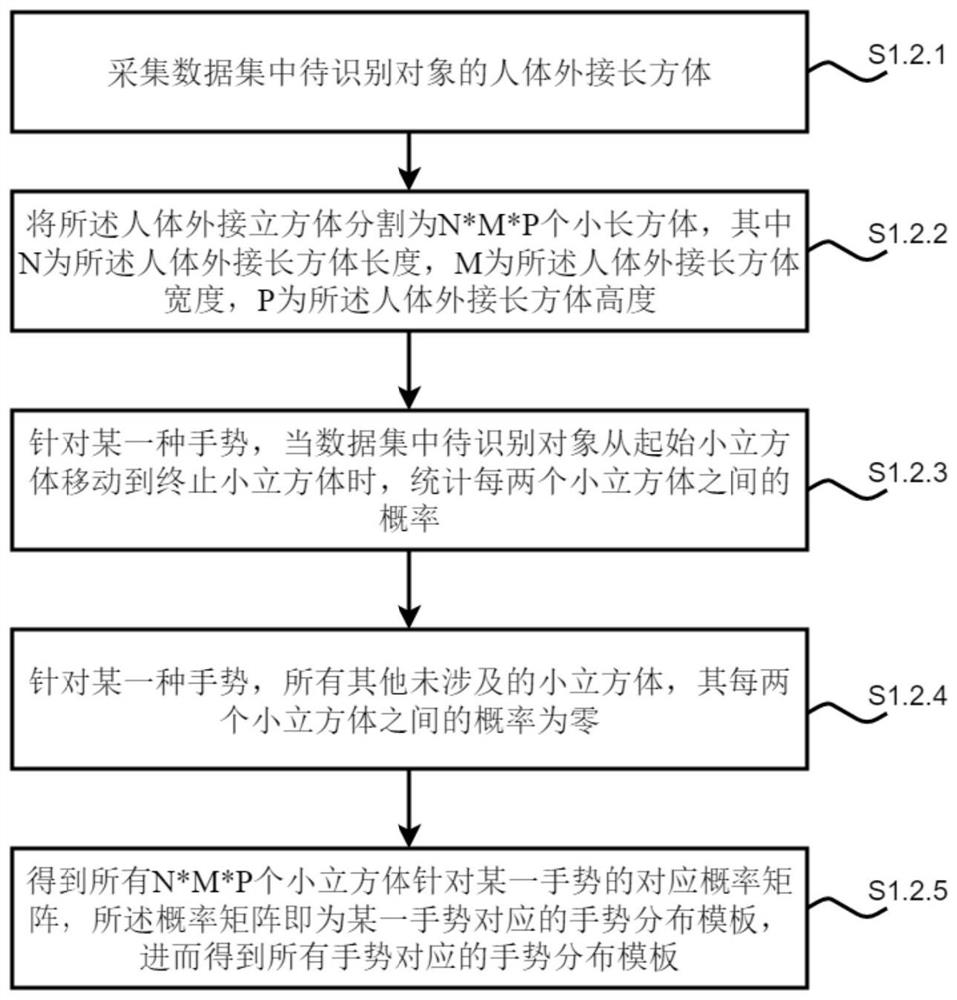
[0069] The embodiment of the present application is a robot for sending and receiving express delivery, which needs to recognize the gestures of the people around its destination, and perform different machine instructions according to different gestures, for example, the action of raising the hand corresponds to opening the upper cover of the robot for sending and receiving express delivery, so as to The courier is taken out or put in; the waving action corresponds to greeting the robot sending and receiving the courier, asking it to stop and not continue to move forward; users can edit different gestures corresponding to different robot instructions for different application scenarios.
[0070] I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More