

Driving path planning method and system based on accident risk cost
A technology for accident risk and path planning, applied in data processing applications, forecasting, instruments, etc., can solve problems such as strong subjectivity, few path induction models, and inaccurate and objective evaluation, so as to overcome excessive subjectivity and reduce traffic accidents Risk, the effect of improving driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] This embodiment provides a driving path planning method based on accident risk cost;
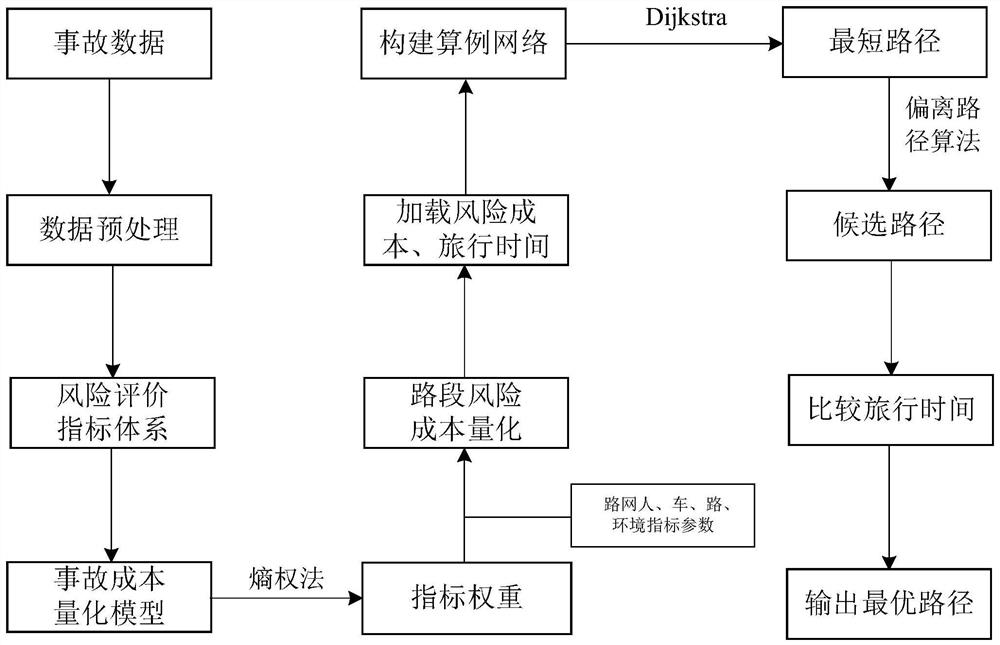
[0049] like figure 1 As shown, the driving path planning method based on accident risk cost includes:
[0050] S101: Obtain historical traffic accident data, and preprocess the data;
[0051] S102: According to historical traffic accident data, establish an accident risk cost evaluation index system;
[0052] S103: Determine the weight of each indicator, and determine the accident risk cost of each road section according to the accident risk quantification model;
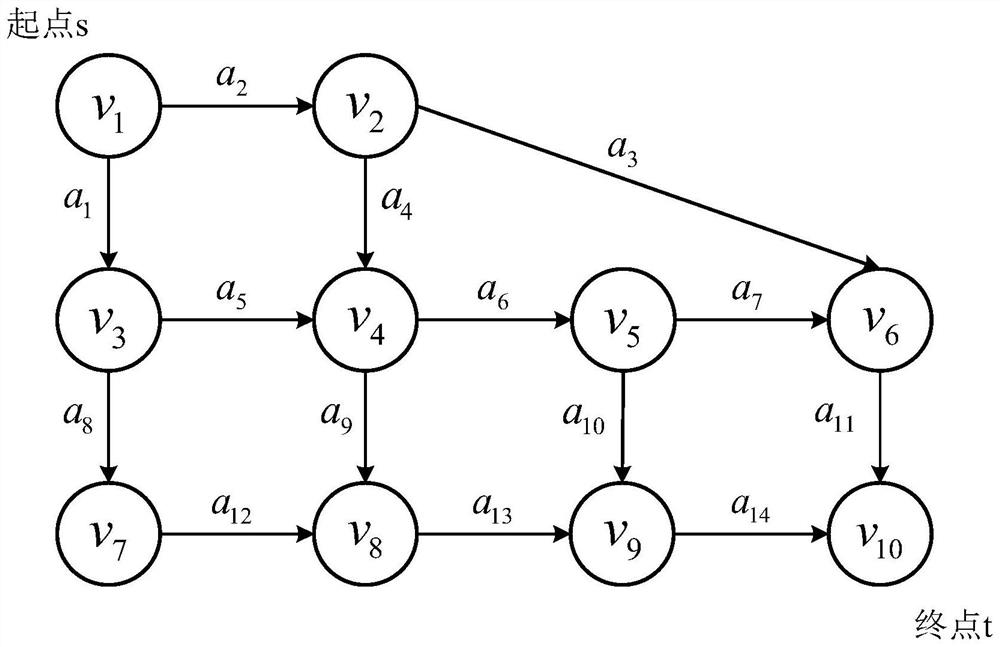
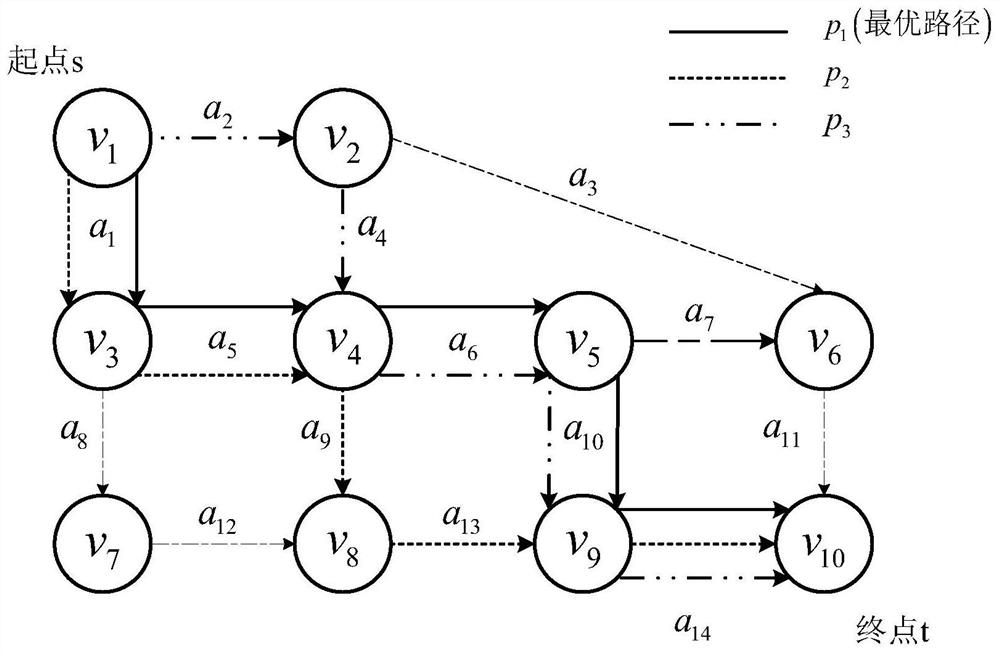
[0053] S104: Construct an example network, and based on the starting point, the ending point, the accident risk cost of each road section, and the travel time of each road section, K shortest path solving algorithms are used to obtain the optimal path.
[0054] Further, the S101: obtain historical traffic accident data; wherein, the historical traffic accident data includes: state descriptions such as personnel, vehicles...
Embodiment 2
[0134] This embodiment provides a driving path planning system based on accident risk cost;
[0135] Driving path planning system based on accident risk cost, including:
[0136] an acquisition module, which is configured to: acquire historical traffic accident data, and preprocess the data;
[0137] An evaluation index system establishment module, which is configured to: establish an accident risk cost evaluation index system according to historical traffic accident data;
[0138] an accident risk cost determination module, which is configured to: determine the weight of each index, and determine the accident risk cost of each road section according to the accident risk quantification model;
[0139] The optimal path solving module is configured to: construct a calculation example network, and use K shortest path solving algorithms to obtain the optimal path based on the starting point, the ending point, the accident risk cost of each road section, and the travel time of eac...
Embodiment 3
[0144] This embodiment also provides an electronic device, including: one or more processors, one or more memories, and one or more computer programs; wherein the processor is connected to the memory, and the one or more computer programs are Stored in the memory, when the electronic device runs, the processor executes one or more computer programs stored in the memory, so that the electronic device executes the method described in the first embodiment.
[0145] It should be understood that, in this embodiment, the processor may be a central processing unit (CPU), and the processor may also be other general-purpose processors, digital signal processors, DSPs, application-specific integrated circuits (ASICs), off-the-shelf programmable gate arrays (FPGAs), or other programmable logic devices. , discrete gate or transistor logic devices, discrete hardware components, etc. A general purpose processor may be a microprocessor or the processor may be any conventional processor or th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More