

Path planning method and device based on improved bidirectional RRT algorithm
A path planning and algorithm technology, applied in measurement devices, road network navigators, navigation and other directions, can solve the problems of long planning time, long search time, low utilization rate of sampling points, etc., achieve smooth processing, reduce the probability of expansion, The effect of reducing memory consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
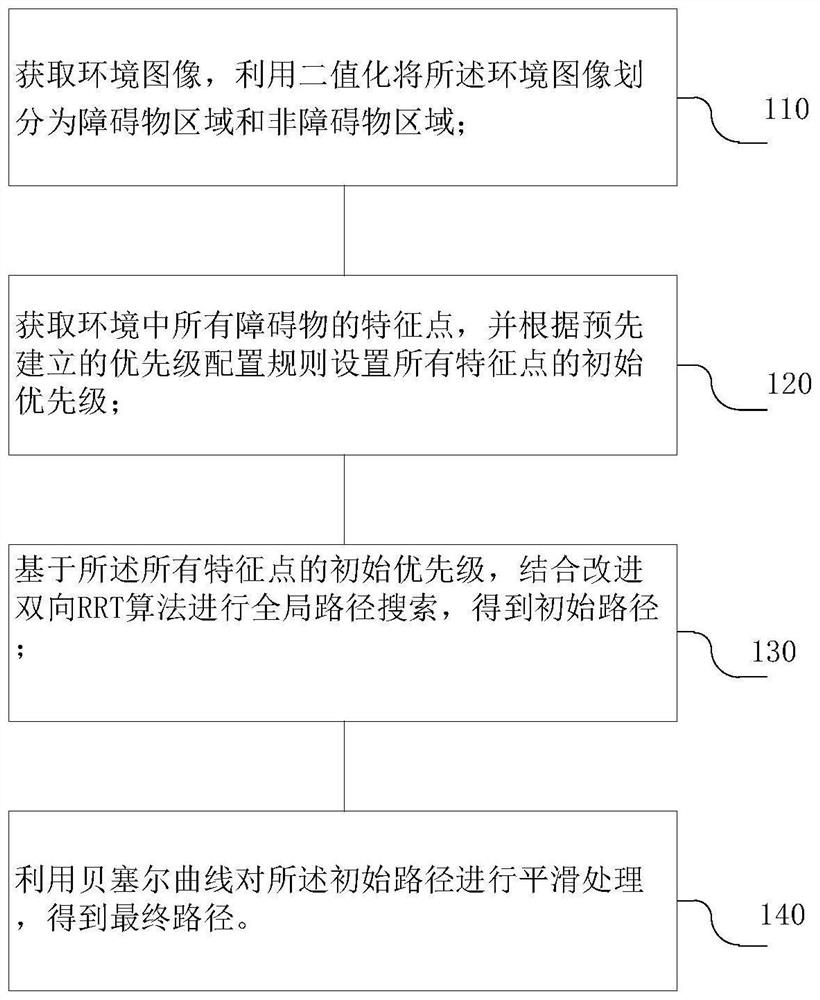
[0056] like figure 1 As shown, a path planning method based on an improved bidirectional RRT algorithm includes the following steps:
[0057] S110, acquiring an environment image, and dividing the environment image into an obstacle area and a non-obstacle area by binarization;
[0058] S120, acquiring feature points of all obstacles in the environment, and setting the initial priorities of all feature points according to a pre-established priority configuration rule;
[0059] S130, based on the initial priorities of all the feature points, combined with the improved bidirectional RRT algorithm to perform a global path search to obtain an initial path;
[0060] S140 , smoothing the initial path by using a Bezier curve to obtain a final path.
[0061] According to Example 1, this solution first obtains the global map information, that is, the environment image, and uses the python-based opencv library to write an image binarization processing program to distinguish the obstacl...
Embodiment 2
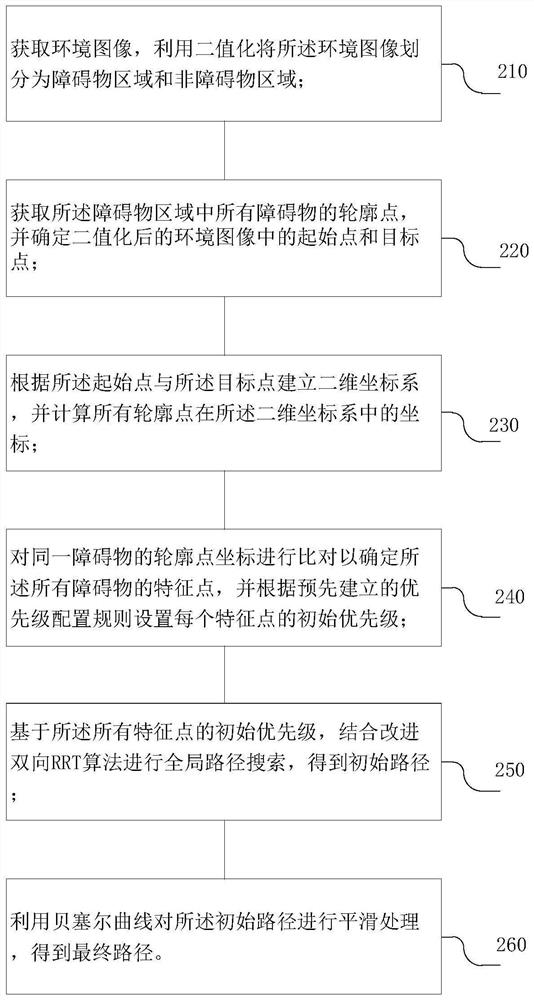
[0063] like figure 2 As shown, a path planning method based on an improved bidirectional RRT algorithm includes:
[0064] S210, acquiring an environment image, and dividing the environment image into an obstacle area and a non-obstacle area by binarization;
[0065] S220, obtaining the contour points of all obstacles in the obstacle area, and determining the starting point and the target point in the binarized environment image;
[0066] S230, establish a two-dimensional coordinate system according to the starting point and the target point, and calculate the coordinates of all contour points in the two-dimensional coordinate system;
[0067] S240, compare the contour point coordinates of the same obstacle to determine the feature points of all the obstacles, and set the initial priority of each feature point according to a pre-established priority configuration rule;
[0068] S250, based on the initial priorities of all the feature points, combined with the improved bidire...
Embodiment 3
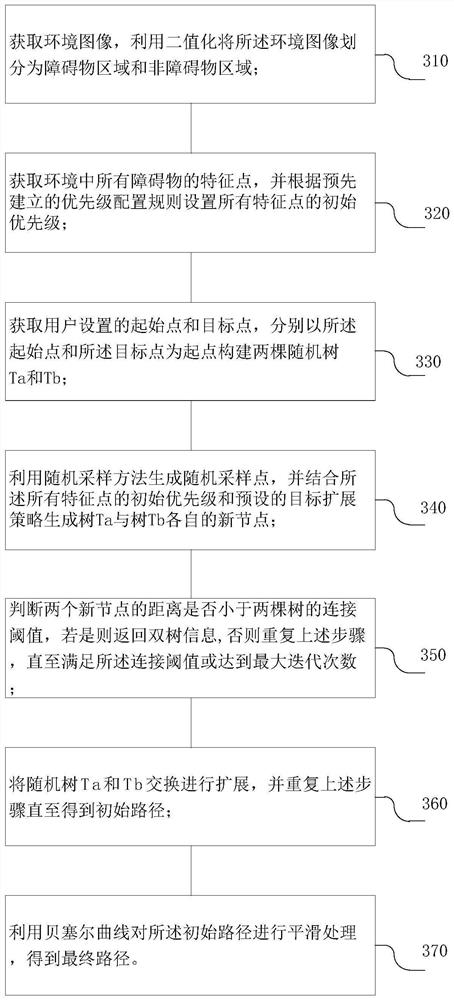
[0080] like image 3 As shown, a path planning method based on an improved bidirectional RRT algorithm includes:
[0081] S310, acquiring an environment image, and dividing the environment image into an obstacle area and a non-obstacle area by binarization;
[0082] S320, acquiring feature points of all obstacles in the environment, and setting the initial priorities of all feature points according to a pre-established priority configuration rule;
[0083] S330, obtaining the starting point and the target point set by the user, and constructing two random trees T with the starting point and the target point as starting points respectively a and T b ;
[0084] S340. Use a random sampling method to generate random sampling points, and generate a tree T in combination with the initial priorities of all the feature points and a preset target expansion strategy awith tree T b their respective new nodes;
[0085] S350, judge whether the distance between the two new nodes is le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More