

Multi-camera high-precision three-dimensional pose tracking method for large-view-field moving target
A technology for moving targets and three-dimensional poses, applied in the field of geometric measurement, can solve problems such as non-optimal reconstruction accuracy, local optimization of camera internal parameters, and unreasonable optimization at the same time, so as to improve measurement accuracy, achieve self-adaptive effects, The effect of improving spatial positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
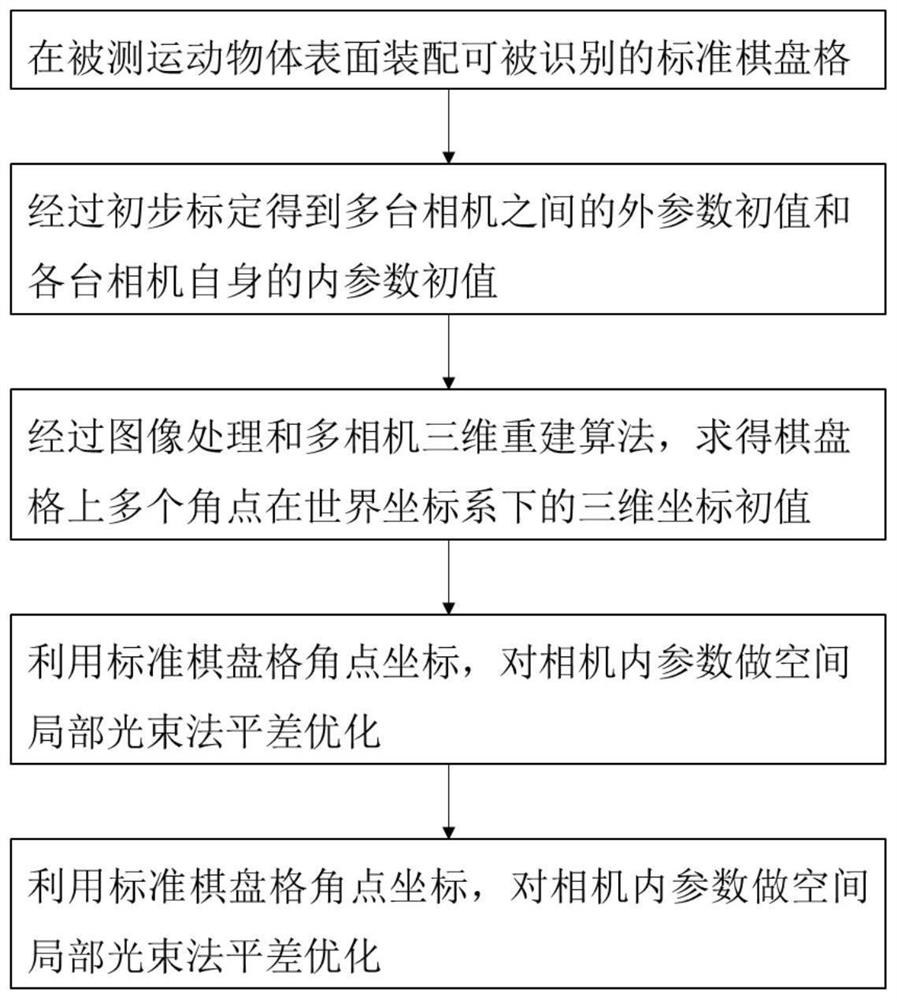
[0037] This embodiment uses a multi-camera vision tracking system to track a moving scanning probe in large-scale measurement. Specifically include the following steps:
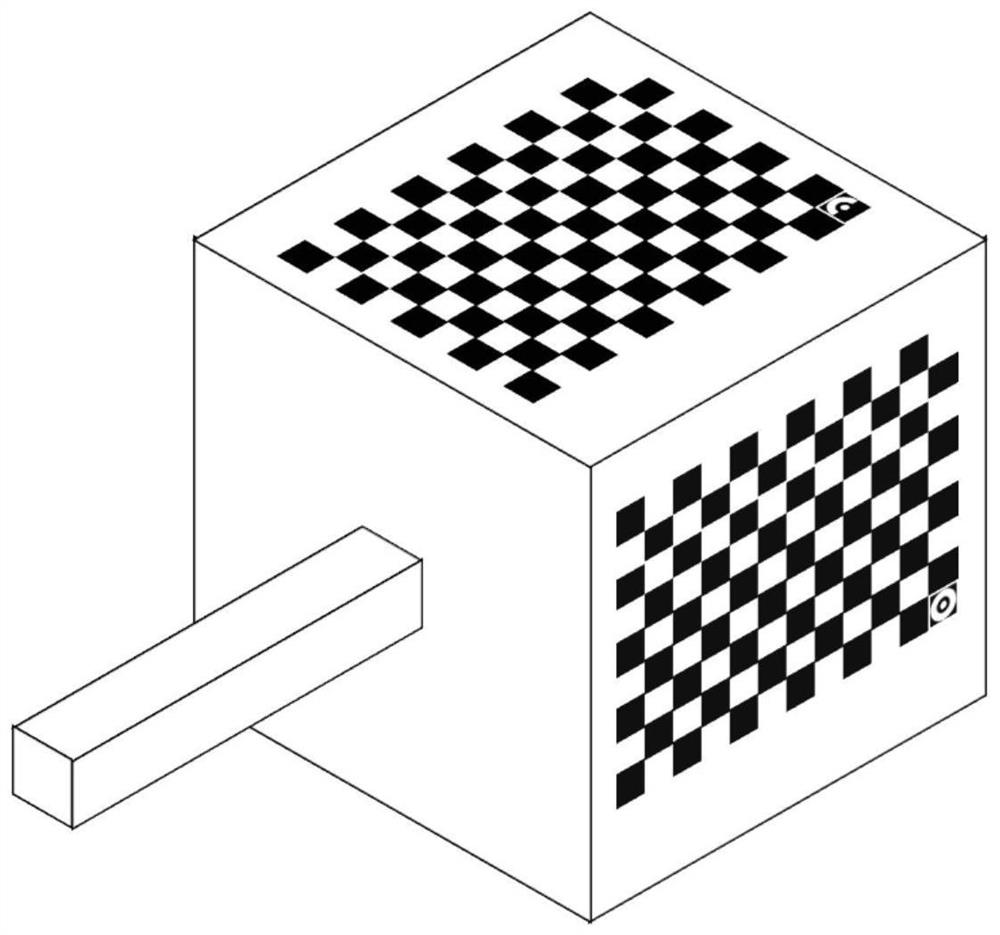
[0038] Step (1): Assemble a recognizable standard checkerboard on the surface of the scanning probe, such as figure 2 , 3 shown;
[0039] Step (2): After calibration, the initial values of the respective internal parameters of m cameras are obtained, which are denoted as C in turn i1 , C i2 , ..., C im , the initial values of external parameters between m cameras are obtained by calibration, which are denoted as C in turn e1 , C e2 , ..., C em ;
[0040]Step (3): After image processing and multi-camera three-dimensional reconstruction algorithm, the initial three-dimensional coordinates of the n corner points on the checkerboard in the world coordinate system are obtained. The initial three-dimensional coordinates are recorded as P in turn. w1 , P w2 ,...,P wn ;
[0041] Step (4): Use the sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More