

Multi-beam underwater terrain combination matching method based on inertial constraints
A matching method and inertial constraint technology, applied in navigation, instrumentation, surveying and navigation, etc., can solve the problems of large influence of the initial inertial error of the ICCP algorithm, easy to fall into local optimal matching, and inability to reduce the cumulative error of inertial trajectory, etc., to achieve improved Accuracy and robustness, effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
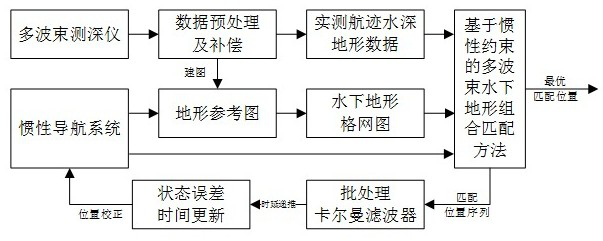
[0080] like figure 1 As shown, the underwater terrain-aided inertial navigation system is mainly composed of five parts: multi-beam echo sounder, inertial navigation system, underwater terrain grid map, matching algorithm and information fusion filter. The function of the multi-beam echo sounder is to measure the water depth and elevation value corresponding to the track point of the underwater vehicle in real time, which can be used as the terrain measurement value to be matched after data preprocessing and error compensation; Provide the navigation parameter information of the aircraft, and the data output update rate is high; the terrain reference map is a digital map of the area extracted from the computer according to the position indicated by the inertial navigation system, and its presentation form is a terrain elevation database stored in a two-dimensional array; matching The function of the algorithm is to match the measured terrain elevation value with the terrain re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More