Novel double-Kalman filtering method
A Kalman filter and Kalman filter technology, applied in the field of filtering, can solve the problems of slow convergence, difficult convergence, and difficult to deal with large error effects, achieve fast convergence, suppress NLOS errors and outliers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention is further illustrated below in conjunction with the accompanying drawings and specific embodiments. The present embodiment is implemented on the premise of the technical solution of the present invention. It should be understood that these embodiments are only used to illustrate the present invention and not to limit the scope of the present invention.
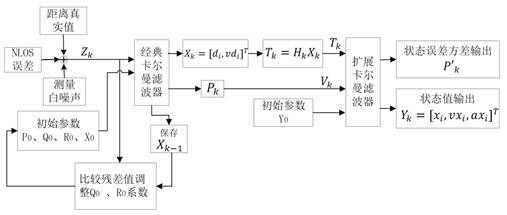
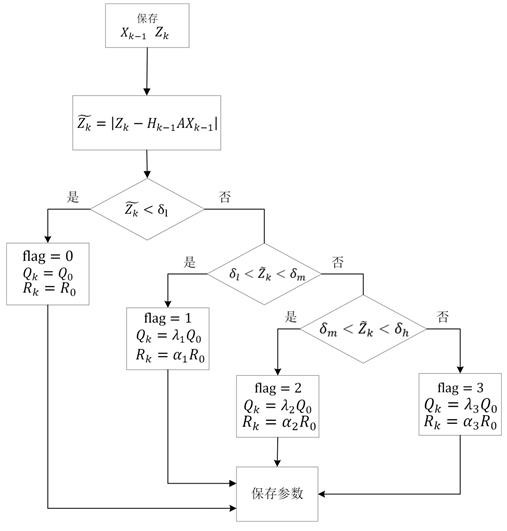
[0064] like figure 1 and figure 2 As shown, an embodiment of the present invention provides a novel dual Kalman filter method, which is implemented based on two Kalman filters. The first is a classical Kalman filter, whose state quantity is determined by the distance between the target and the base station. value and the rate of change of the distance value, the measurement value is the distance measurement value between the target and the base station. The second is the extended Kalman filter, whose state quantity is determined by the position coordinates of the label (two-dimensionally positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com