

Upper and lower limb rehabilitation robot, control method, medium and computer equipment
A rehabilitation robot and control method technology, applied in the field of rehabilitation robots, can solve problems such as poor compliance and single movement of rehabilitation robots, and achieve the effects of reducing labor costs, precise rehabilitation training process, and improving rehabilitation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The specific embodiments of the present invention will be described below with reference to the accompanying drawings.
[0073] The present application provides an active-passive-upper-limb rehabilitation robot control method for upper and lower limbs, using six-dimensional force sensors, myoelectric signal sensors and corresponding control algorithms combined with the concept of active-passive rehabilitation training for upper and lower limbs.
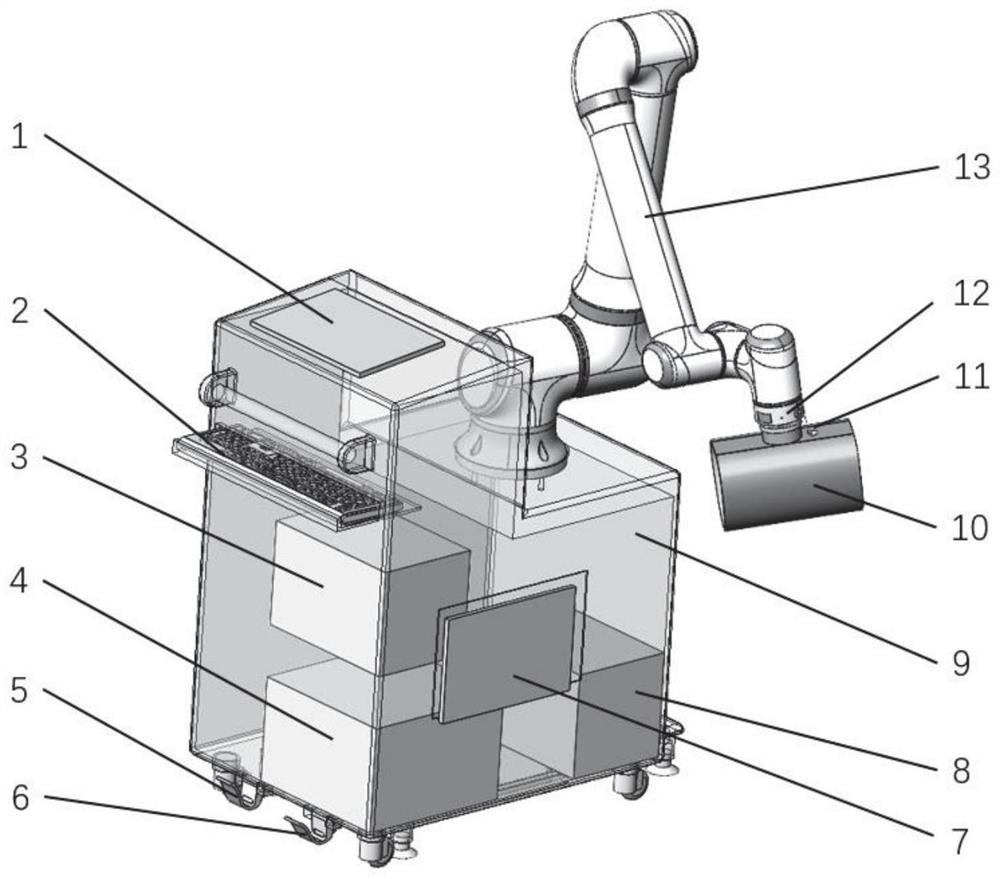
[0074] like figure 1 As shown, the control method of the upper and lower limb rehabilitation robot of the present application is applied to an upper and lower limb rehabilitation robot, including a mechanical arm and its control system, a quick-release clamp and a six-dimensional force sensor provided at the execution end of the mechanical arm, and EMG sensor;
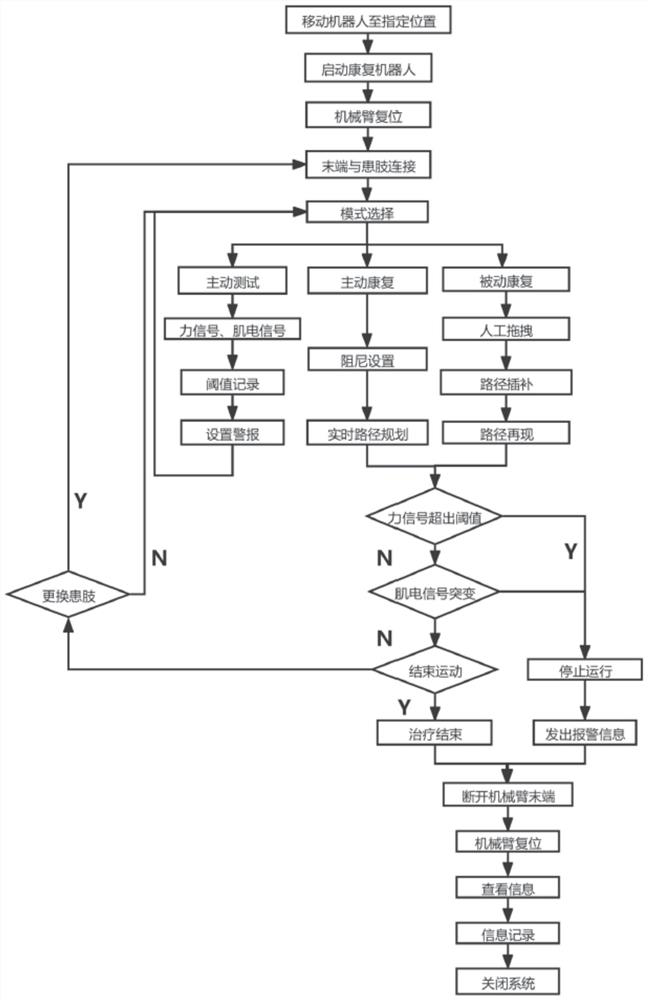
[0075] see figure 1 , the control methods include:
[0076] S1. Obtain the data related to the patient's affected limb through active testing, and set the alarm thre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More