

Rescue task crowd map splicing system and method based on custom descriptor
A self-defined and descriptor technology, applied in the field of rescue mission crowd map stitching system, can solve the problems of unable to estimate the crowd to be rescued, and not making full use of crowd information, so as to reduce the amount of calculation, ensure effectiveness, and ensure accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
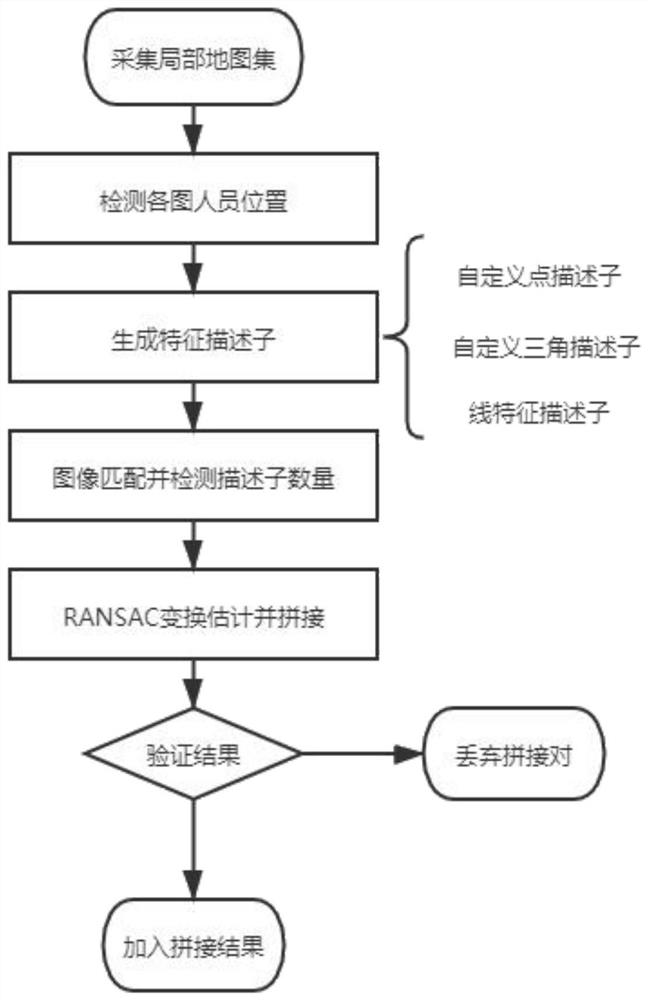
[0073] A crowd map stitching method for rescue missions based on custom descriptors, including:
[0074] Step S1: obtaining map data to be spliced;
[0075] Step S2: Detect the pedestrian position of the map data to be spliced;
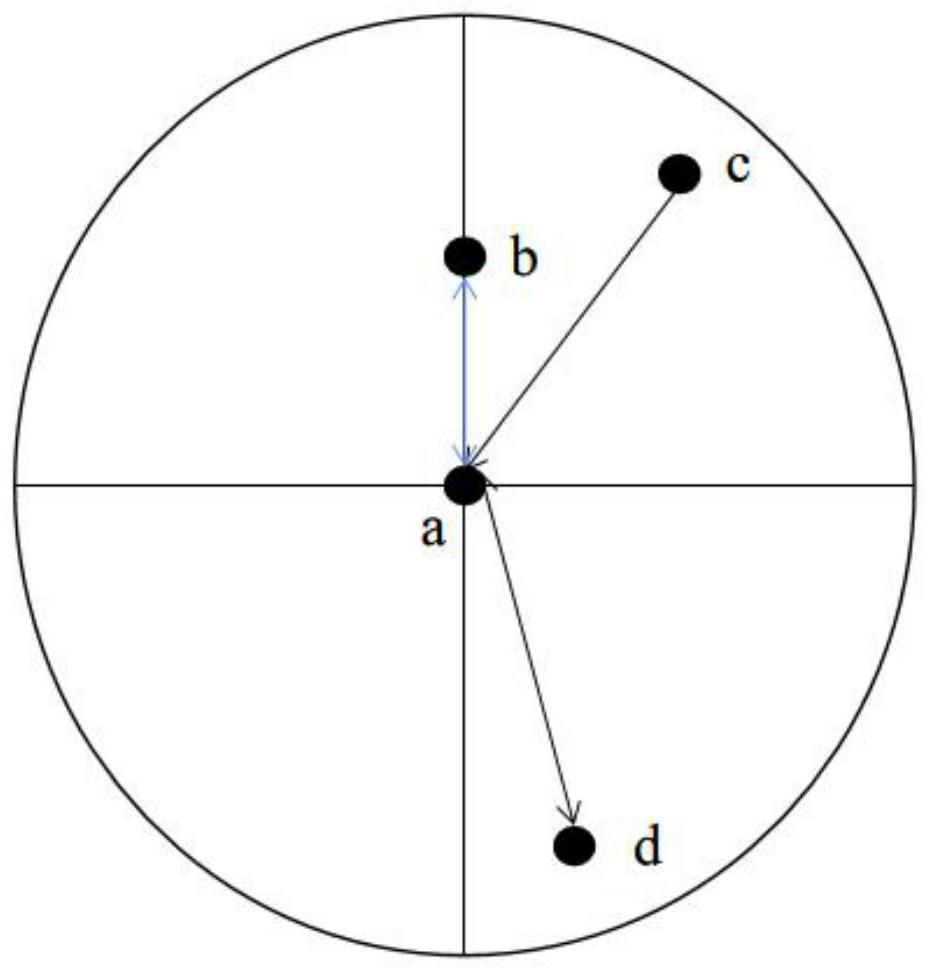
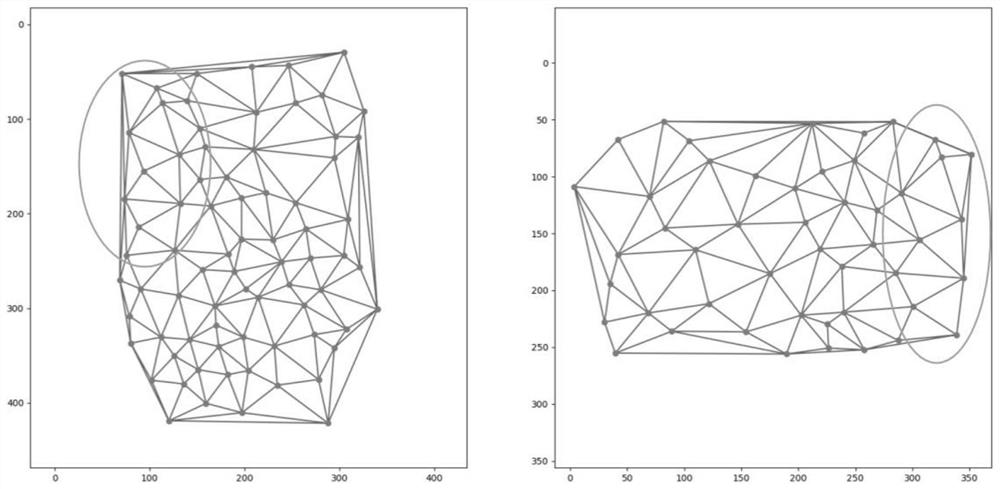
[0076] Step S3: Generate a custom descriptor according to the detected pedestrian position and a descriptor to be spliced. The custom descriptor can effectively stitch pictures with less overlap and is robust to maps with sparse textures and has high accuracy , better application generalization and environmental requirements;
[0077] Step S4: For all the pictures to be spliced, the number of descriptors is detected for pairwise matching;
[0078] Step S5: Use the RANSAC algorithm to perform transformation estimation splicing and verification on the images according to the matching logarithm in descending order. The verification process can effectively correct the splicing results of the images that fail to match, and reduce the impact of difficult-...
Embodiment 2
[0114] The rescue mission crowd map splicing system based on the self-defined descriptor can realize the rescue mission crowd map splicing method based on the user-defined descriptor described in the first embodiment, including:
[0115] Data acquisition module: used to acquire map data to be spliced;
[0116] Detection module: used to detect the pedestrian position of the map data to be spliced;
[0117] Descriptor generation module: used to generate a custom descriptor and a descriptor to be spliced according to the detected pedestrian position;
[0118] Matching module: used to detect the number of descriptors for pairwise matching of all images to be spliced;
[0119] Splicing verification module: It is used to perform transformation estimation splicing and verification on the image according to the matching logarithmic descending order.
Embodiment 3
[0121] The embodiment of the present invention also provides a rescue mission crowd map splicing device based on a custom descriptor, which can implement the custom descriptor-based rescue mission crowd map splicing method described in Embodiment 1, including a processor and a storage medium;
[0122] the storage medium is used for storing instructions;
[0123] The processor is configured to operate in accordance with the instructions to perform the steps of the following methods:
[0124] Obtain the map data to be spliced;
[0125] Detect the pedestrian position of the map data to be spliced;
[0126] Generate a custom descriptor and a descriptor to be spliced according to the detected pedestrian position;
[0127] For all the images to be spliced, the number of matching detection descriptors is detected in pairs;
[0128] According to the matching logarithmic descending order, the images are transformed, estimated, stitched and verified.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More