

Tail end pose precision compensation method for long-arm-span high-altitude operation composite robot
A precision compensation and high-altitude operation technology, applied in the field of robots, can solve the problems of low working precision, achieve the effect of improving working precision, improving work efficiency and avoiding danger
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
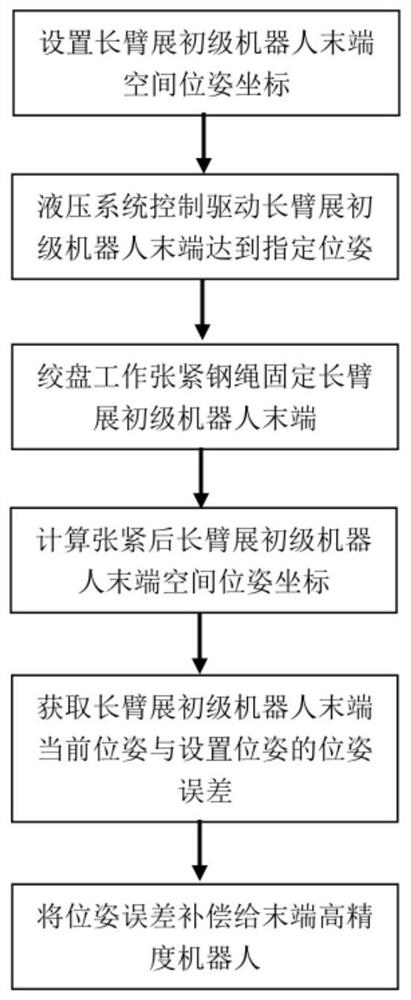
[0027] The present invention provides a method for compensating the end pose and attitude accuracy of a composite robot for high-altitude operations with a long arm span. The steps of the method include:
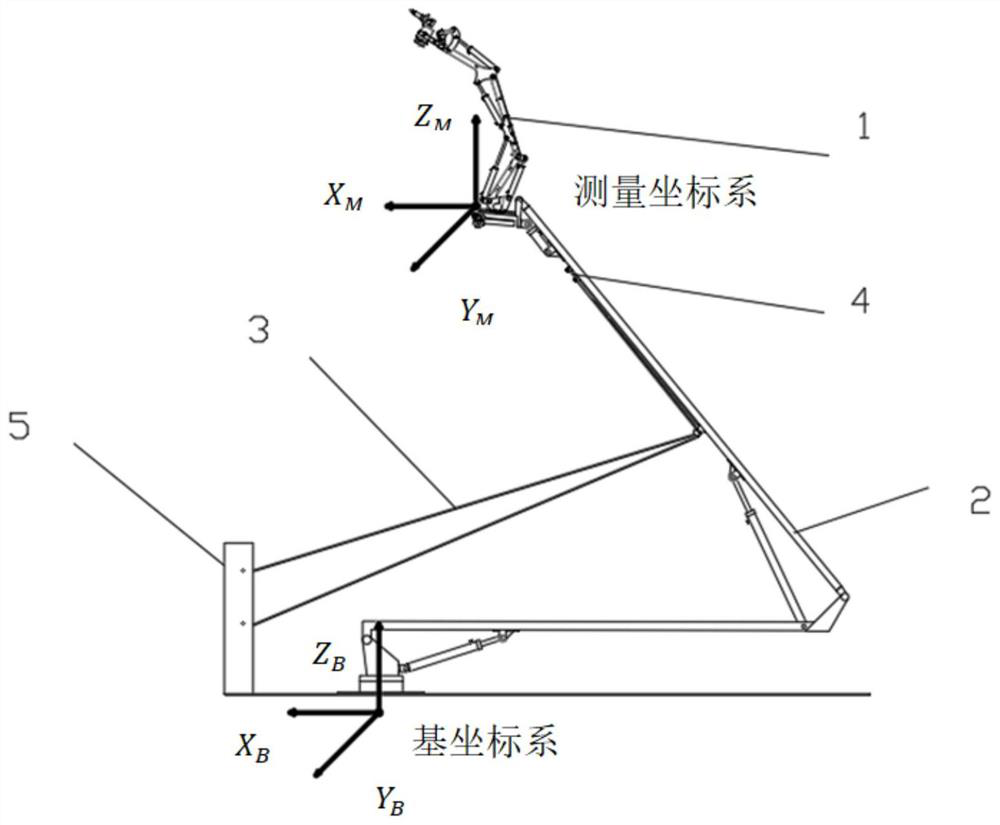
[0028] (1) Establish the base coordinate system of the long-reach aerial work composite robot (such as figure 2 shown by X B , Y B ,Z B composition) and the measurement coordinate system (such as figure 2 shown by X M , Y M ,Z M composition), set the long-reach primary robot end (the origin of the measurement coordinate system) relative to any desired workspace pose of the base coordinate system
[0029] (2) Start the winch device 5 to tension the wire rope systems 3 and 4, and monitor the tension on the rope through the wire rope tension sensor to F (F is less than the stiffness limit that the primary robot with long arms can bear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More