

Intelligent auxiliary robot for container
A container and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of complex surface of containers, difficulty in developing stability software, and easy infection of human-operated twist locks, so as to prevent confusion, ensure stability, and reduce cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
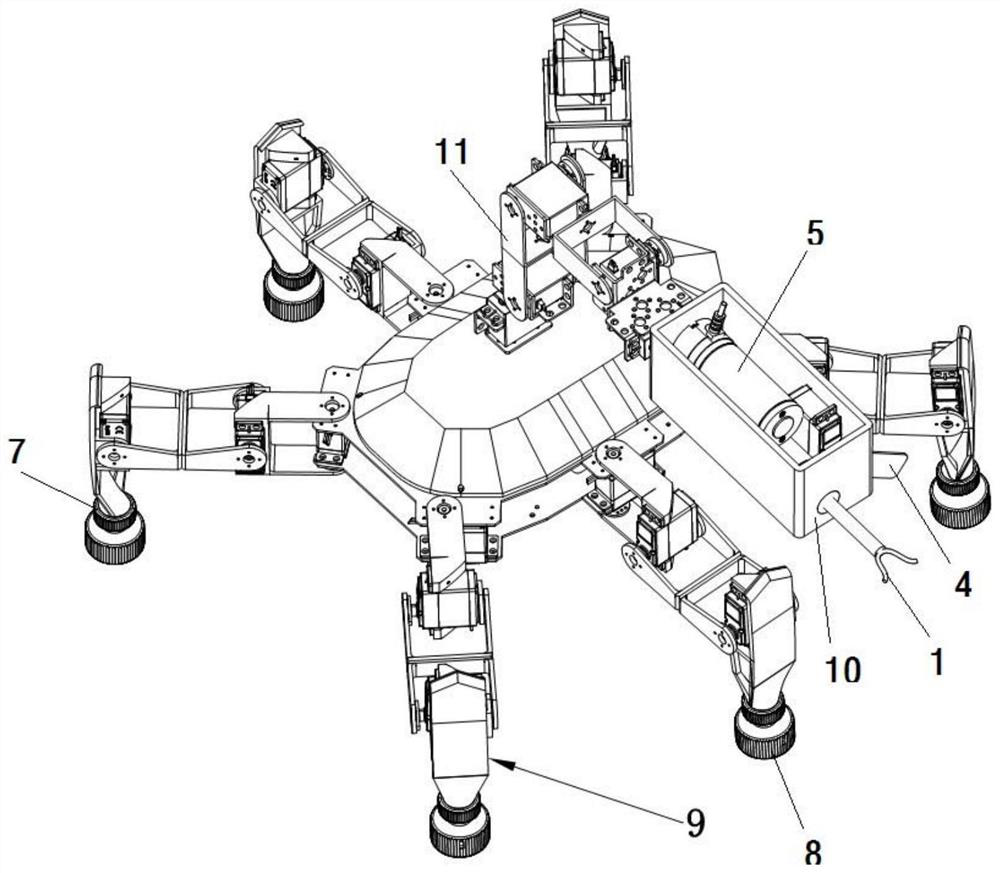
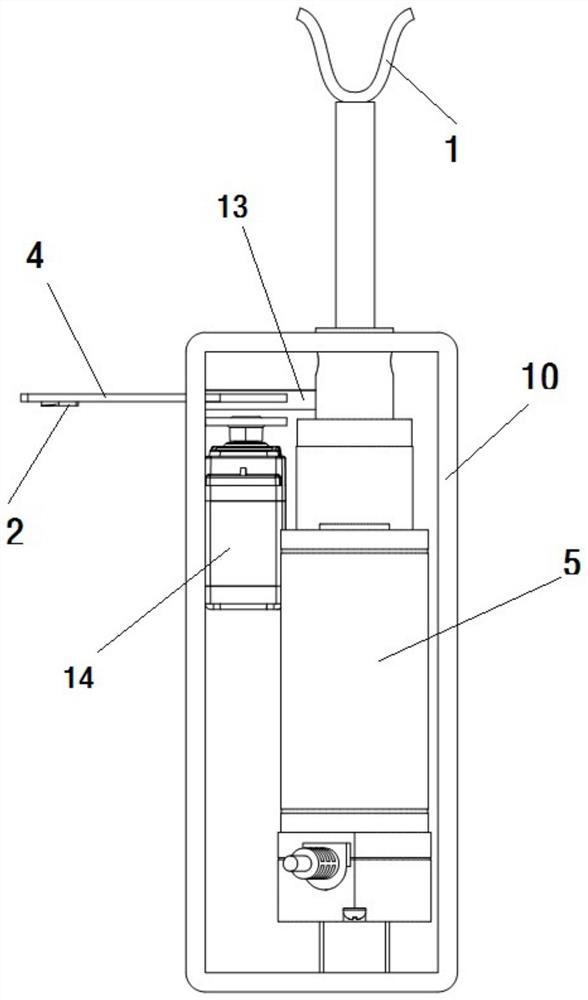
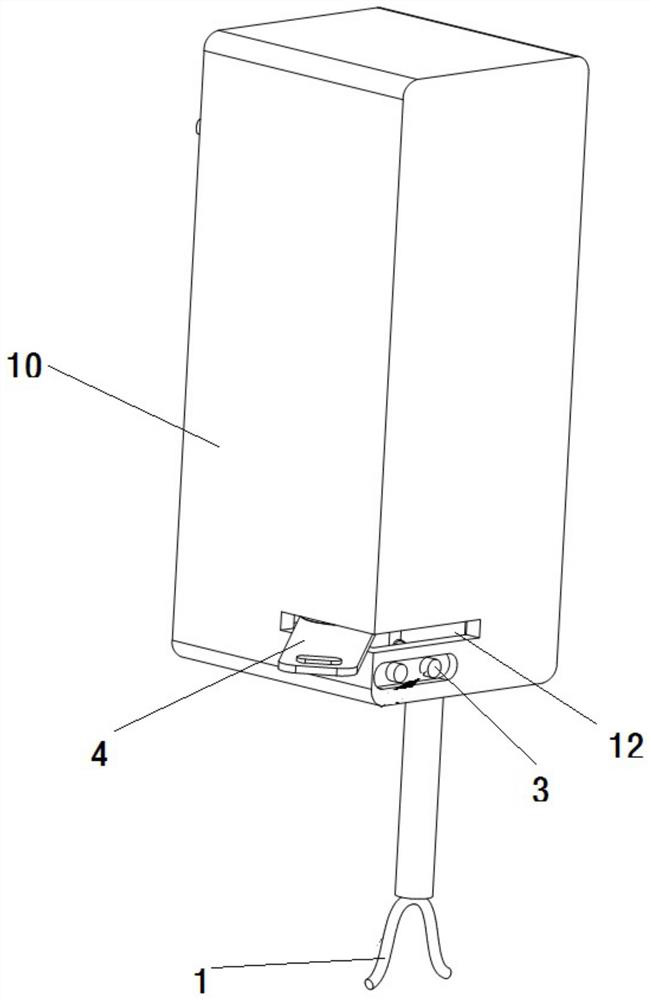
[0044] Container intelligent assistance robots, such as figure 1 , figure 2 , image 3 and Figure 4 Shown: it includes a robot body on which a setting component, a camera, a path planning component, a master controller, a control component and a plurality of walking feet 9 are installed. There are six walking feet 9 , and each walking foot 9 has three degrees of freedom of movement. A plurality of foot steering gears are installed on the walking feet 9 , and the foot steering gears correspond to the movement degrees of freedom one-to-one.
[0045] An electromagnet assembly is installed on the walking foot 9. The electromagnet assembly obtains the control signal and is adsorbed on the container or disconnected according to the control of the control assembly. The electromagnet assembly includes an electromagnet body 8, a magnet controller, a magnet driver and a first Two strain force sensors, the second strain force sensor is arranged on the end surface of the electromagnet ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More