

Visual positioning system and method based on feature noise reduction
A visual positioning and noise reduction technology, applied in the field of visual positioning system, can solve the problems of time-consuming and labor-intensive, over-fitting, high initial frame, etc., and achieve the effect of improving the accuracy of relocation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
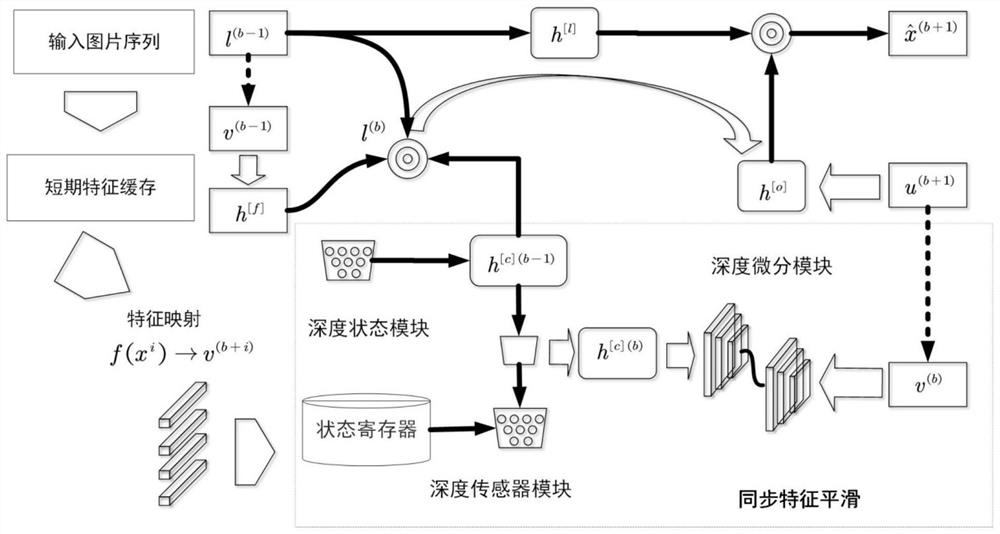
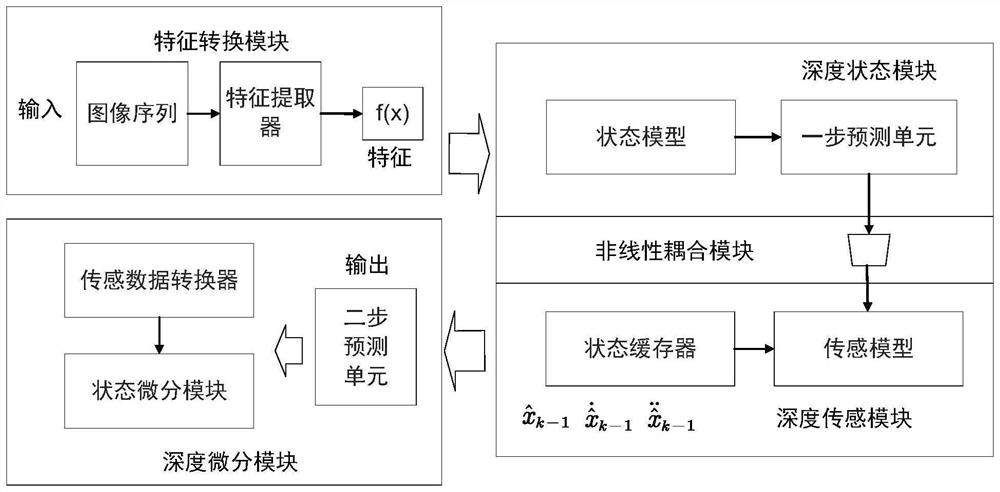
[0042] The invention mainly introduces a visual positioning system based on feature noise reduction. Generally, a moving target takes a series of pictures of the surrounding environment from its own angle during the movement process, and the system can predict the position of the moving target at the moment of shooting through the taken pictures. pose and the future motion path of the moving object. Specifically, in our visual localization network, by learning from datasets (input pictures or short-term picture sequences), the system can provide real-time location predictions for moving objects under offline conditions, and further, it only The future motion path of a moving object can be predicted by inputting a picture. The path prediction network can obtain real-time path planning when conditions are met, and its prediction results can cooperate with the motion control system to make more time-saving and safer motion planning for unexpected situations along the way. Genera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More