

Dish-shaped underwater robot for aquaculture monitoring
An underwater robot, aquaculture technology, applied in the directions of underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of large degrees of freedom and water resistance, high energy consumption, low anti-interference, etc., to improve stability, Small resistance, the effect of reducing sailing resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments:
[0024] The invention provides a disc-type underwater robot for aquaculture detection, which avoids the disadvantages of high energy consumption, low degree of freedom, large water resistance, and poor anti-interference of traditional underwater robots. The ability to strongly resist the interference of underwater advection, and at the same time, through the control thrust of the surrounding propellers, improve the flexibility of maneuvering, can meet the needs of aquaculture monitoring, and solve the roll phenomenon caused by uneven internal mass distribution of the disc type. .
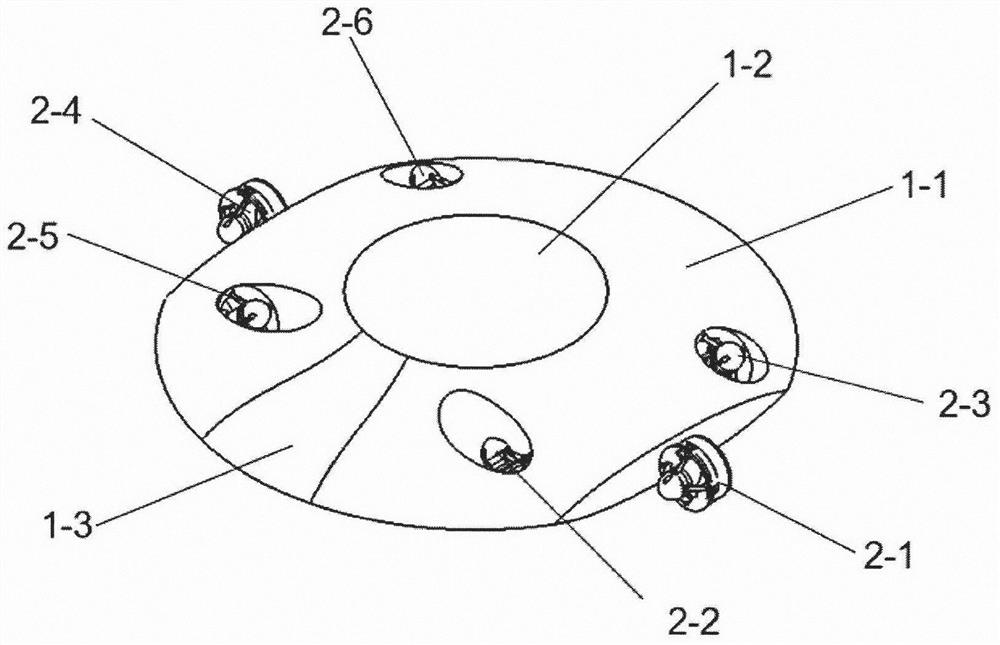
[0025] As a specific embodiment of the present invention, the present invention adopts such as figure 1 Robot structure and thruster layout shown:
[0026] The underwater robot is in the shape of a dish as a whole, and the disc shell 1-1 is fixed on the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More