

IMU (Inertial Measurement Unit) attitude resolving method based on maximum correlation entropy Kalman filter
A technology of Kalman filter and maximum correlation entropy, applied in the field of attitude calculation of inertial navigation, to achieve the effect of reliable estimation, enhanced robustness, and suppression of outliers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The preferred embodiments of the present invention are described in detail below with reference to the accompanying drawings, wherein the accompanying drawings constitute a part of the present application, and together with the embodiments of the present invention, serve to explain the principles of the present invention.
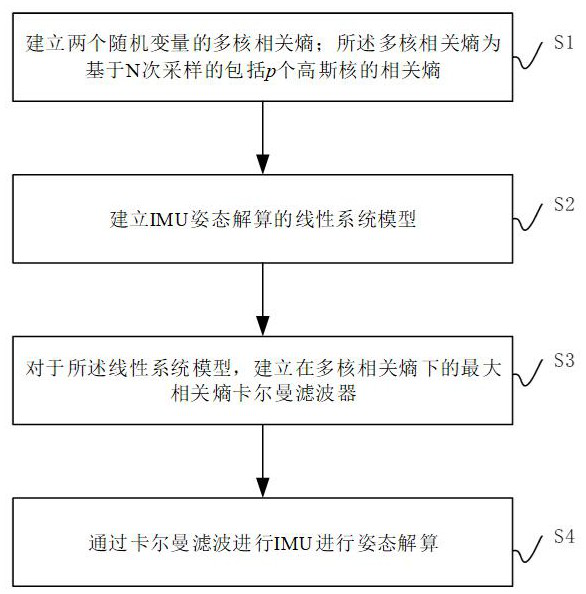
[0058] An embodiment of the present invention discloses an IMU attitude calculation method based on the maximum correlation entropy Kalman filter. figure 1 shown, including:
[0059] Step S1, establish the multi-core correlation entropy of two random variables; the multi-core correlation entropy is based on N sampling including p Correlation entropy of a Gaussian kernel;
[0060] Step S2, establishing a linear system model for IMU attitude calculation;
[0061] Step S3, for the linear system model, establish the maximum correlation entropy Kalman filter under the multi-kernel correlation entropy;
[0062] Step S4, performing attitude calculation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More