

Trajectory tracking method and device of foot type robot, terminal equipment and medium
A trajectory tracking and robot technology, applied in the field of robotics, can solve problems such as difficulty in meeting trajectory tracking requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
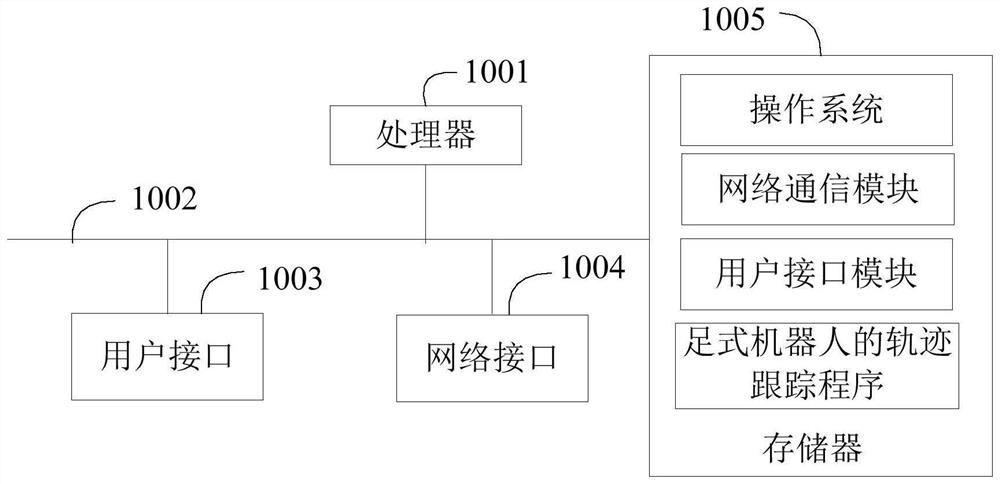
[0042] like figure 1 shown, figure 1 It is a schematic structural diagram of the hardware operating environment of the terminal device involved in the solution of the embodiment of the present invention.
[0043] It should be noted that the terminal device involved in the embodiment of the present invention may be a terminal device for tracking the trajectory of a footed robot, and the terminal device may be integrated on the footed robot so as to be integrated with the footed robot, or, The terminal device can also be independent of the footed robot, and only communicate with the footed robot to realize the trajectory tracking of the footed robot. In this case, the terminal device can be a smartphone, a tablet, a computer, a server, etc. equipment.
[0044] like figure 1As shown, the terminal device may inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More