

Teaching aid for demonstrating dynamic relations of instant center, pole trace, temporary axis and pole face in fixed point rotation of rigid body
A technology of body pole track and rigid rotor, which is applied in the field of demonstration teaching aids and can solve the problem of not being able to demonstrate the dynamic relationship of three-dimensional space positions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
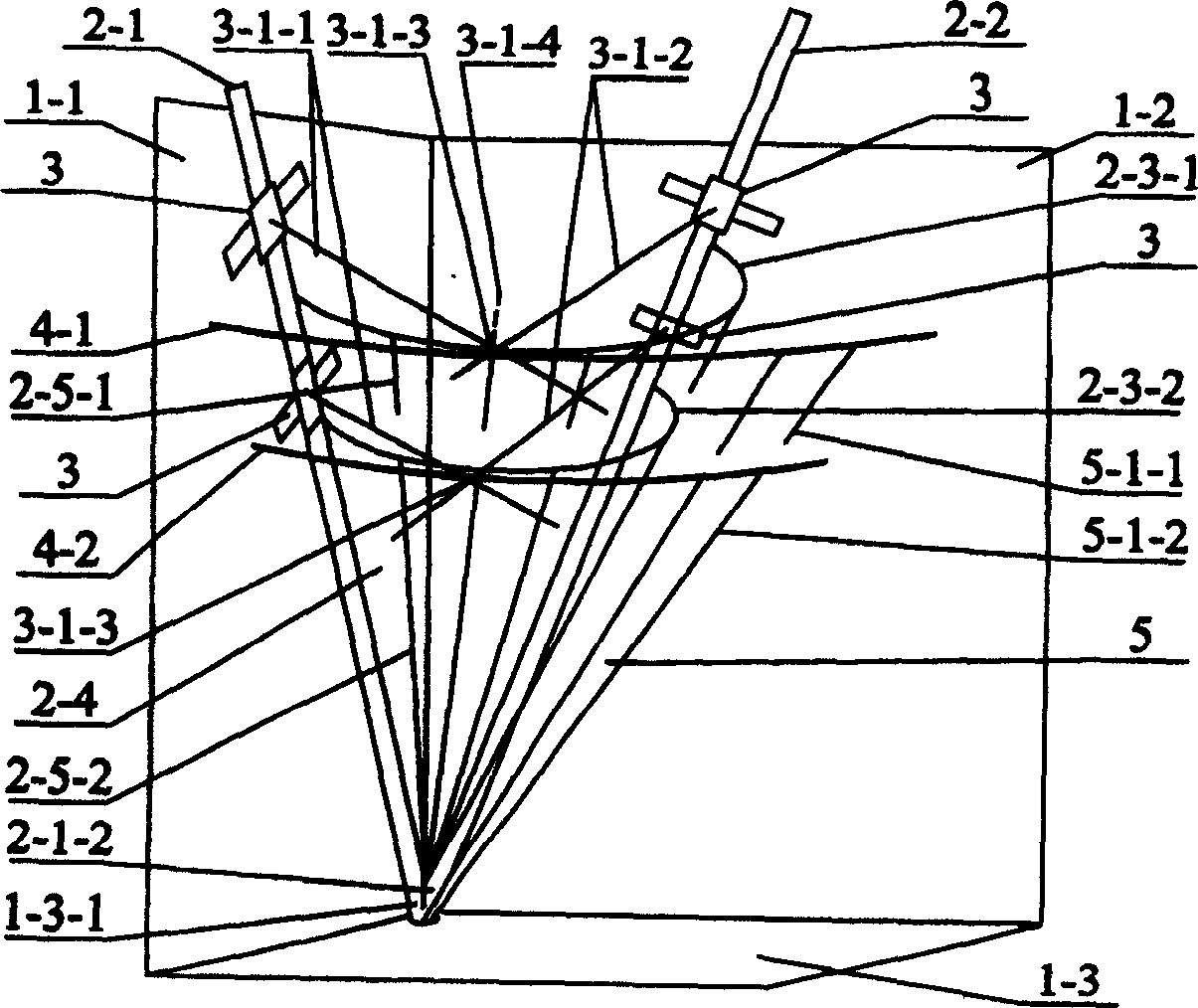
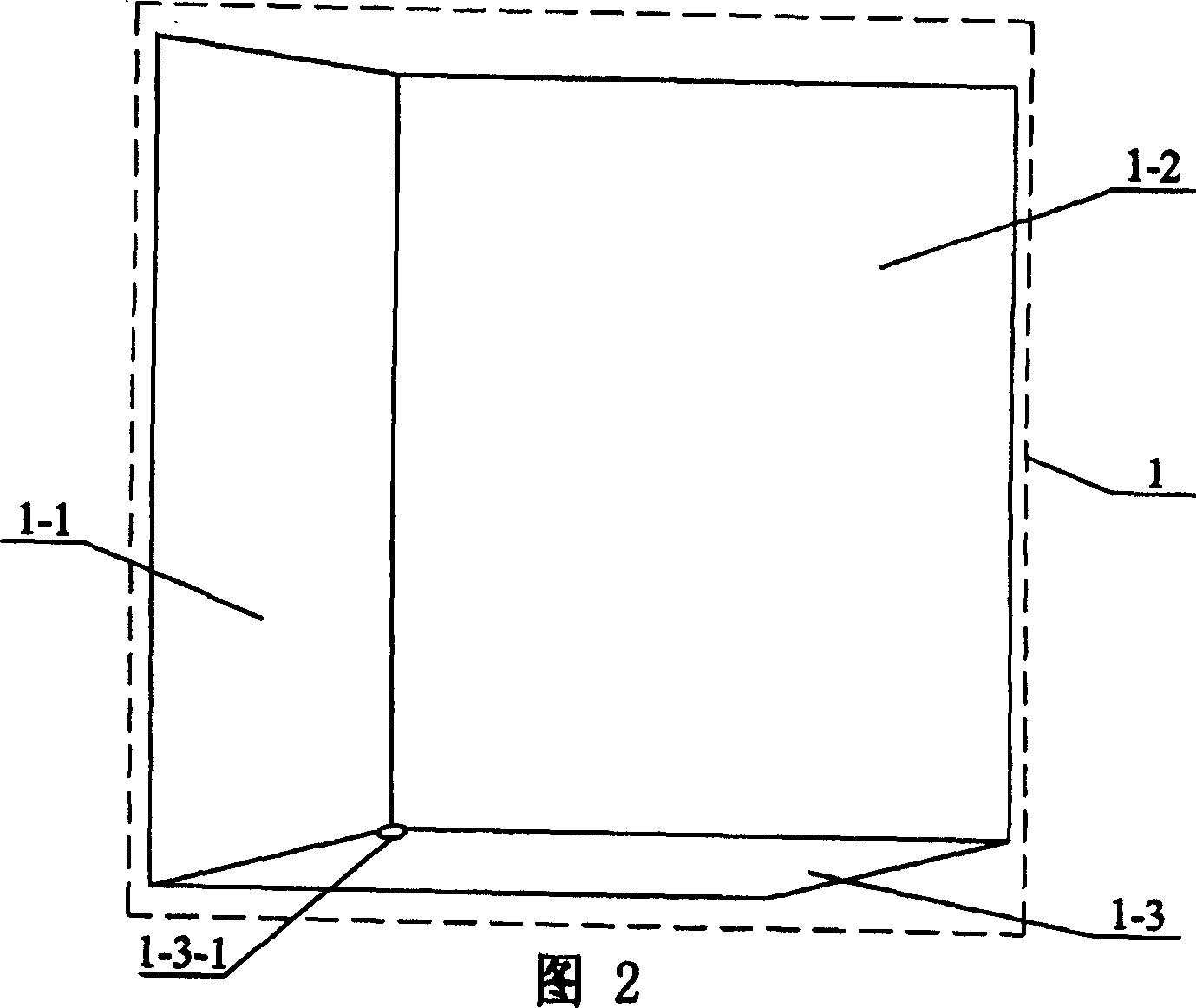
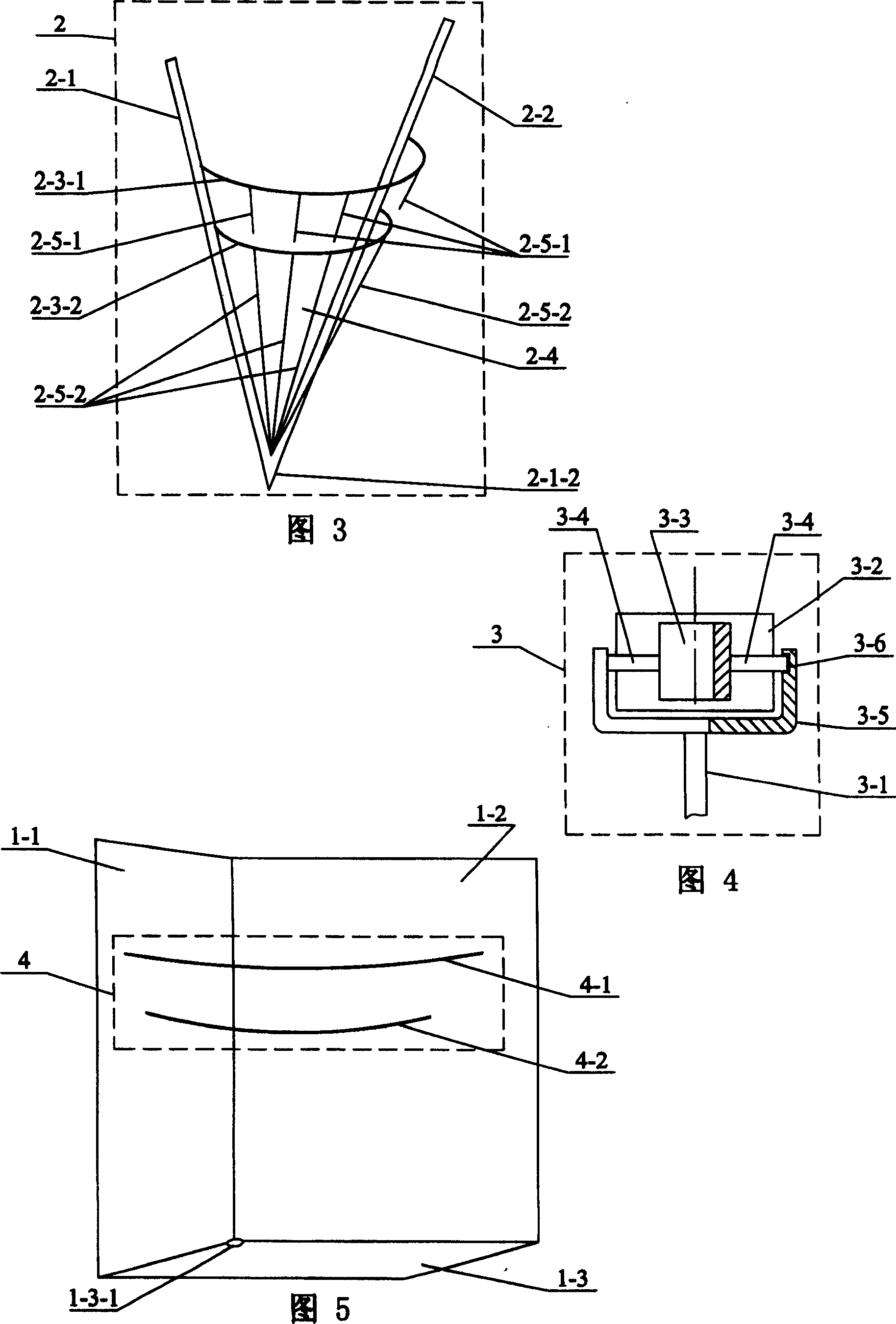
[0005] Specific implementation mode one: (see Figure 1-Figure 6) This embodiment is made up of three-dimensional skateboard 1, rigid body rotor 2, speed perpendicular device 3, space pole mark 4, space pole surface 5; The two planes of the left skateboard 1-1 and the right skateboard 1-2 are fixed together orthogonally; 1. The base plate 1-3 at the intersection with the right slide plate 1-2 is provided with a small conical pit 1-3-1; the rigid rotor 2 is a semi-cone whose orthogonal cross-section is a semi-ellipse, and is formed by the left shaft 2-1. , right shaft rod 2-2, upper body pole mark 2-3-1, lower body pole mark 2-3-2, straight rod 2-5-1, straight line 2-5-2, upper body pole mark 2- The two ends of 3-1 are respectively fixed on the upper part of the left shaft 2-1 and the right shaft 2-2, and the lower body pole 2-3-2 is arranged below the upper body pole 2-3-1 and its two ends respectively fixed on the left shaft rod 2-1 and the right shaft rod 2-2, the upper en...
specific Embodiment approach 2
[0006] Specific implementation mode two: (see Figure 7 ) The difference between this embodiment and the specific embodiment 1 is that the straight rod 2-5-1 and the straight line 2-5-2 on the conical generatrix of the rigid body rotor 2 are replaced by the pole surface 2-4' of the transparent plate body, and the space The E straight rod 5-1-1 and the F straight line 5-1-2 on the tapered busbar of the pole surface 5 are replaced by the pole surface 5' of the transparent plate space, on the left speed vertical line 3-1-1 and the right speed vertical line 3 - The pole surface 2-4' of the transparent plate body at the pole mark 2-3-2 of the lower body where the cross point of 1-2 moves laterally has a transverse slit 2-3-2-1 on the polar surface of the transparent plate space There is a transverse gap 4-2-1 at the position of the B space pole 4-2 on the 5′, so that the crossed left velocity vertical line 3-1-1 and the right velocity vertical line 3-1-2 can pass horizontally in th...
specific Embodiment approach 3
[0007] Specific implementation mode three: (see Figure 8 ) The difference between this embodiment and the specific embodiment 1 is that the straight rod 2-3-4 on the rigid rotor 2 is replaced by the added next No. body pole 2-3-3 and the next No. 2 body pole 2-3-4 5-1 and straight line 2-5-2, and add C space polar mark 4-3 and D space polar mark 4-4 to replace E straight bar 5-1-1 and F straight line 5-1 on space polar plane 5 -2; The next No. body pole mark 2-3-3 is set on the lower side of the lower body pole mark 2-3-2, and its two ends are respectively fixed on the left shaft rod 2-1 and the right shaft rod 2-2, and the bottom No. 2 body pole mark 2-3-4 is arranged on the lower side of the next No. body pole mark 2-3-3, and its two ends are respectively fixed on the left shaft rod 2-1 and the right shaft rod 2-2, and the C space pole The trace 4-3 is located at the lower side of the B space pole 4-2, and its two ends are respectively fixed on the left slide 1-1 and the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More