

Pneumatic manipulator
A technology of wind turbine and manipulator, which is applied to manipulators, agricultural machinery and implements, picking machines, etc., to achieve the effect of excellent and reasonable structure, wide range of uses and simple structure
Inactive Publication Date: 2003-07-23
刘方炎
View PDF0 Cites 2 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Especially the manipulators that need to work at high frequency and work synchronously with the wind are still blank
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
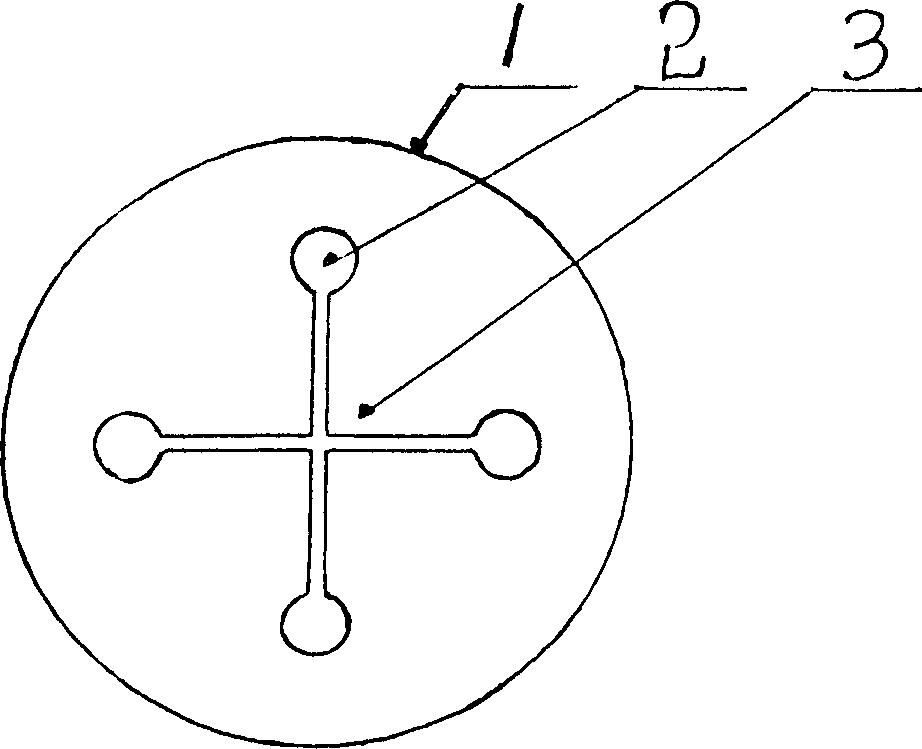
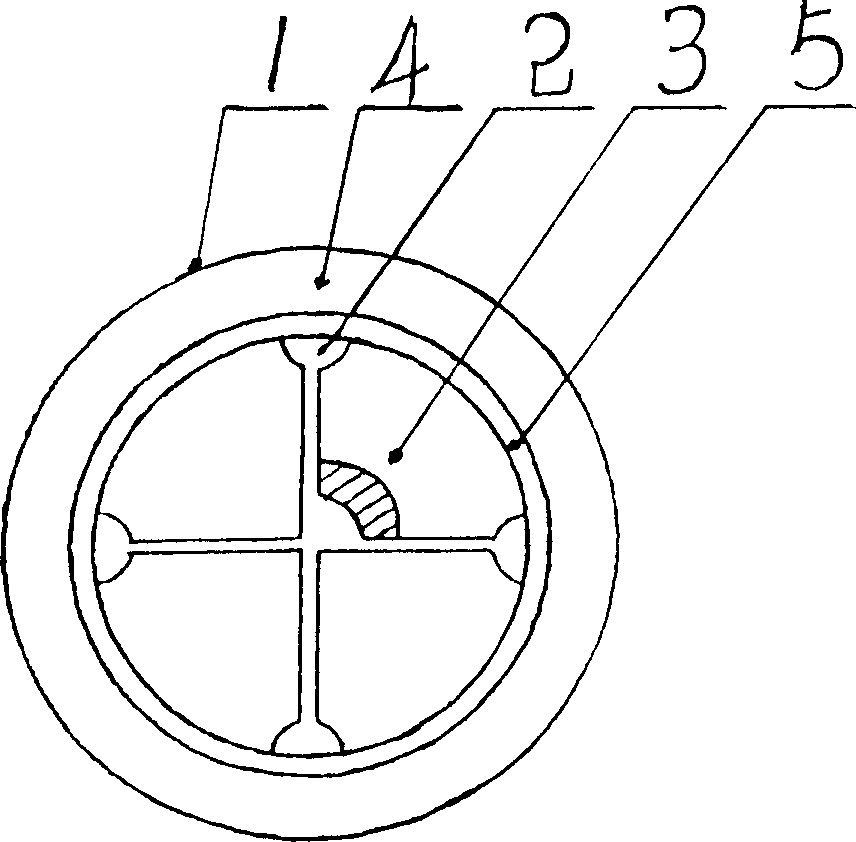
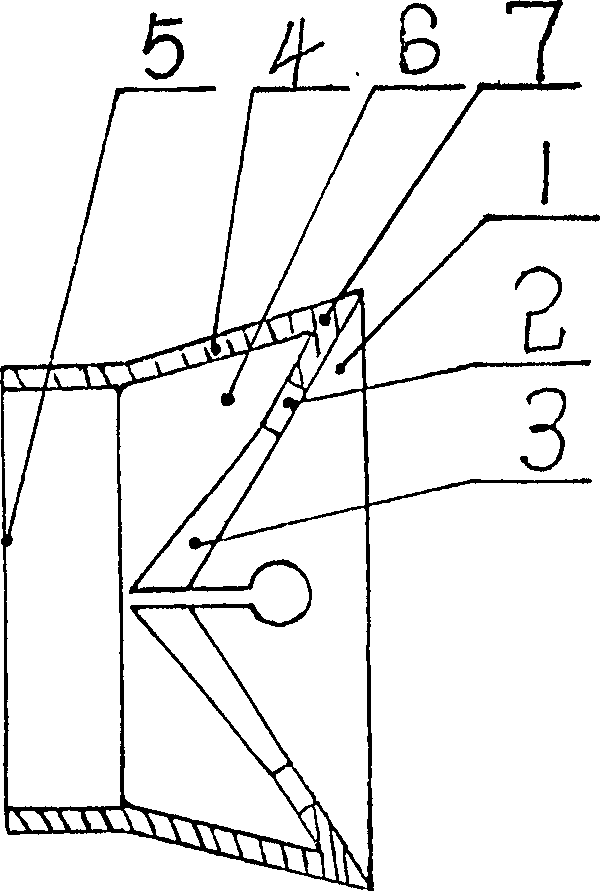
[0014] Example: such as figure 1 , figure 2 , image 3 As shown, the present invention adopts the material of imitating the flesh to make, and it comprises wrist (1), palm (4) and finger, and finger is made of knuckle (7) and finger (3), is designed with knuckle (7) Sew the fork (2), one end of the wrist (5) is designed with a suction pipe connection port, and the other end is a trumpet-shaped palm (4), the palm (4) supports and connects the wrist (5), knuckles (7), and fingers (3) form a whole, form the barbed fingers (3) and bell mouth (1) outwards by bending the knuckles of the palm end, and form the space palm (6) inward. The bases of two adjacent fingers are recessed respectively to form a semicircular fork (2).
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
A pneumatic manipulator for picking up cotton, fruit and vegetable is composed of a wrist with air sucking opening, horn-shaped palm, finger with joint, and human meat simulating material. Its advantages are high picking up quality and durability, and saving energy. It is used in conjuction with sucking gun.
Description
technical field [0001] The invention relates to a picking and pick-up machine, especially a manipulator replacing high-intensive labor. Background technique [0002] The current manipulator needs to be equipped with systematic auxiliary high-tech equipment to achieve the purpose of work, and the purpose is single, and the cost is also very expensive. Due to its complex structure and working principle, the operation group is limited, and it is difficult for ordinary technicians to master it. Therefore, existing manipulators or robots cannot be applied to high-intensity labor production. Such as: agricultural production, sanitation work and other labor-intensive fields. Especially the manipulators that need to work at high frequency and work synchronously with the wind are still blank. Contents of the invention [0003] The invention is a high-efficiency pneumatic manipulator developed for the crop harvesting production with high manual labor intensity, concentrated matur...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): A01D46/10B25J11/00
Inventor刘方炎
Owner刘方炎