

Method and device for controlling robot simulating animal foot movement
A bionic robot, rhythmic motion technology, applied in manipulators, manufacturing tools, etc., can solve problems such as flexibility, stability and adaptability gaps, and achieve the effect of good environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
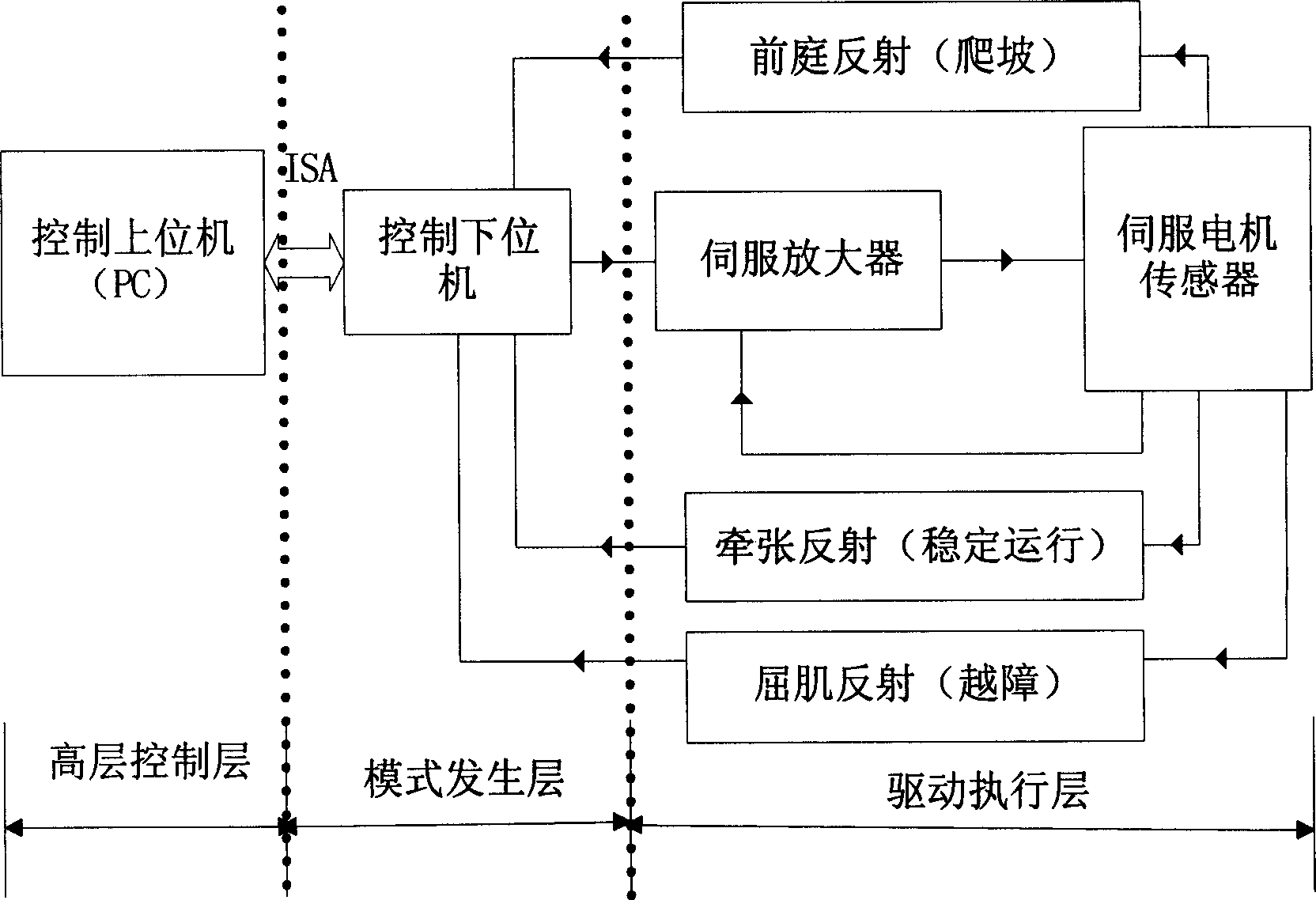
[0027] figure 1 For the overall scheme of the footed bionic robot control system of the present invention, since the rhythmic motion control system of animals is considered to be layered and modular, it can be divided into high-level control layer, pattern generation layer and drive execution layer. Among them, the high-level control layer sends out motion commands to control the start of rhythmic motion of animals; the pattern generation layer generates rhythmic motion signals of various joints, so that animals can realize different motion modes and can switch between them; the drive execution layer, That is, the animal's musculoskeletal system produces motor output.
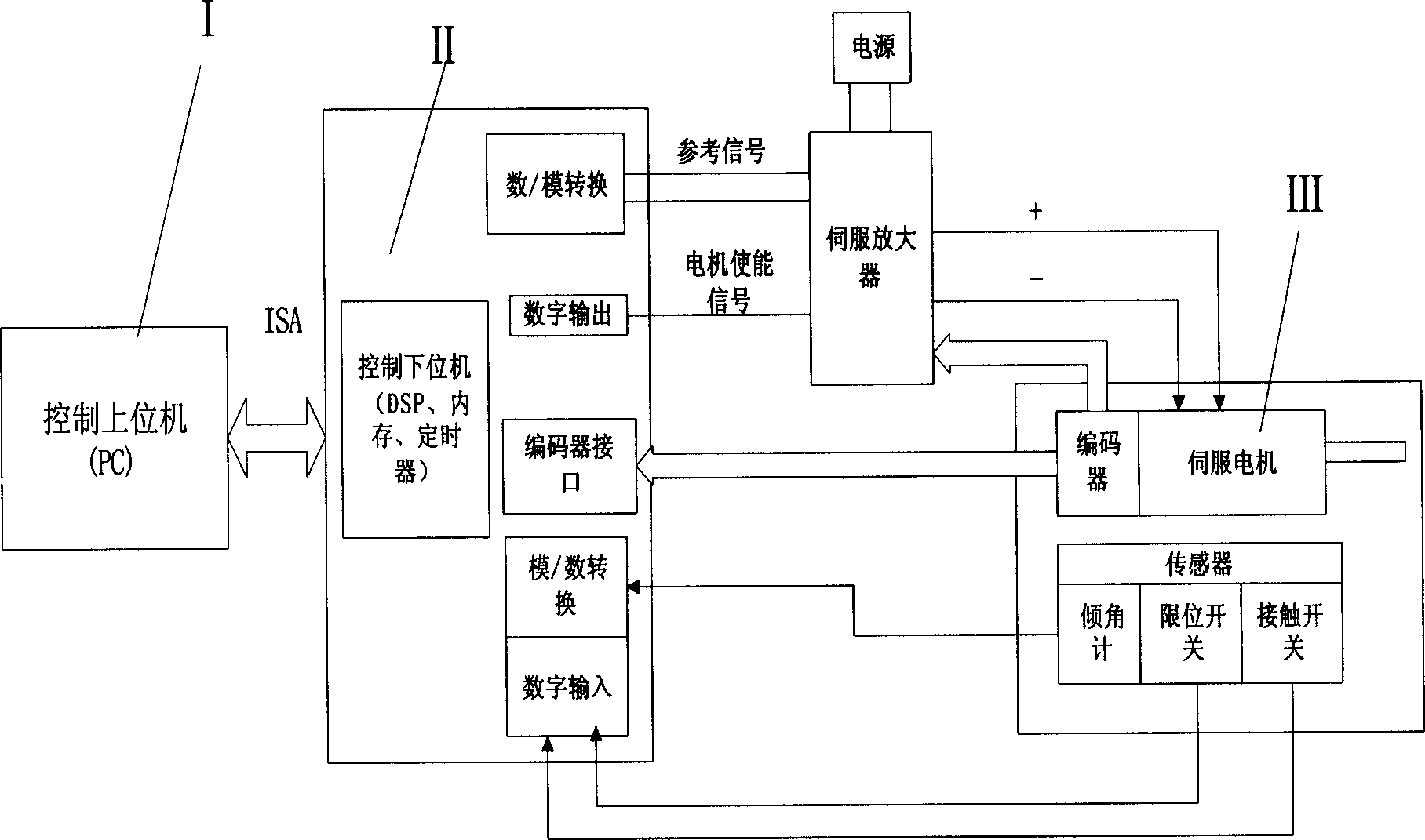
[0028] Similar to the animal rhythmic motion control network, a robot motion control system including three functional layers is built. Among them, the high-level control layer determines the start of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More