

Method for calibrating structure optical vision sensor
A visual sensor and calibration method technology, applied in the field of measurement, can solve the problems of a small number of calibration points, low image point extraction accuracy, easy reflection of teeth, etc., and achieve the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0056] The actual design of the structured light vision sensor is as follows: Image 6 shown. 10 is the housing of the sensor, 11 is the window for the CCD to observe the scene, and 12 is the exit port of the laser. The positions of CCD and laser in the sensor are different, and their parameters are also different.
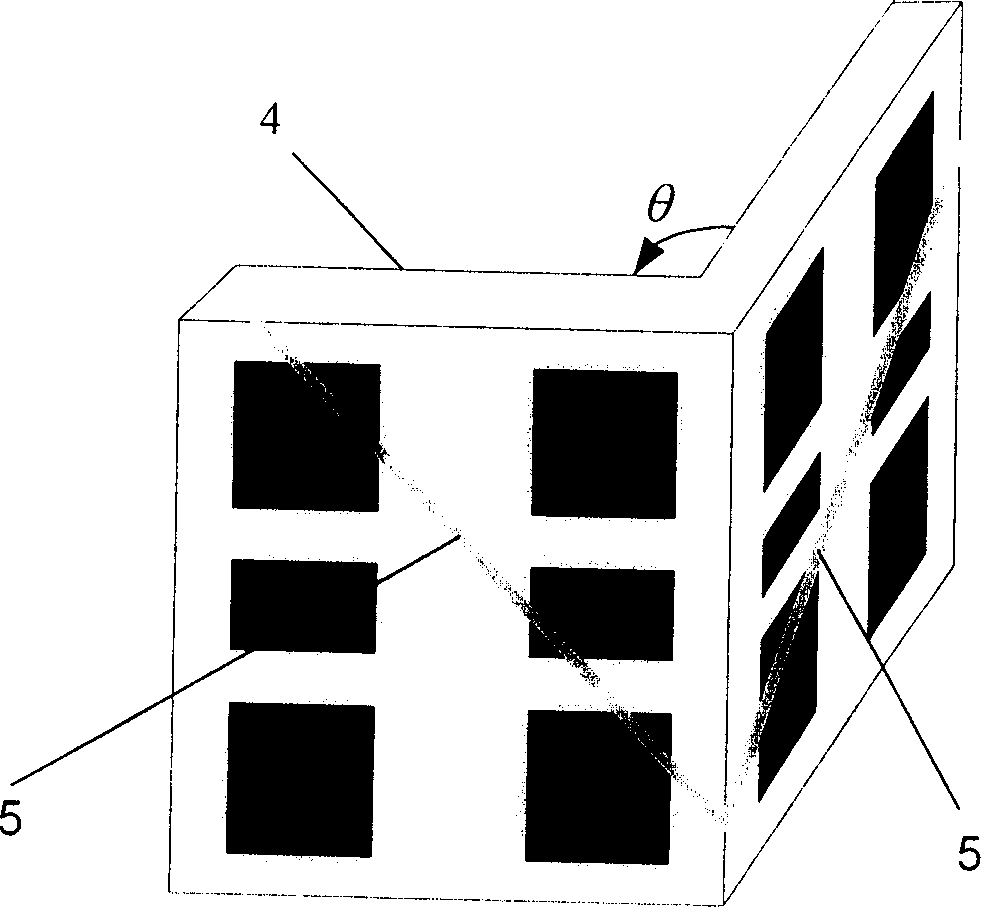
[0057] Following the steps described above, use the image 3 The targets shown (θ = 90°) were calibrated for three specific sensors.
[0058] Sensor one:
[0059] ·Camera perspective projection imaging model parameters
[0060] R = 0.135832 0.171788 0.975725 0.843045 - 0.537361 - 0.022753 0.520408 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More