

Running fix platform for macro/micro dual driven miniature type robot
A mobile positioning and positioning platform technology, applied in the direction of microstructure technology, microstructure devices, chemical instruments and methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
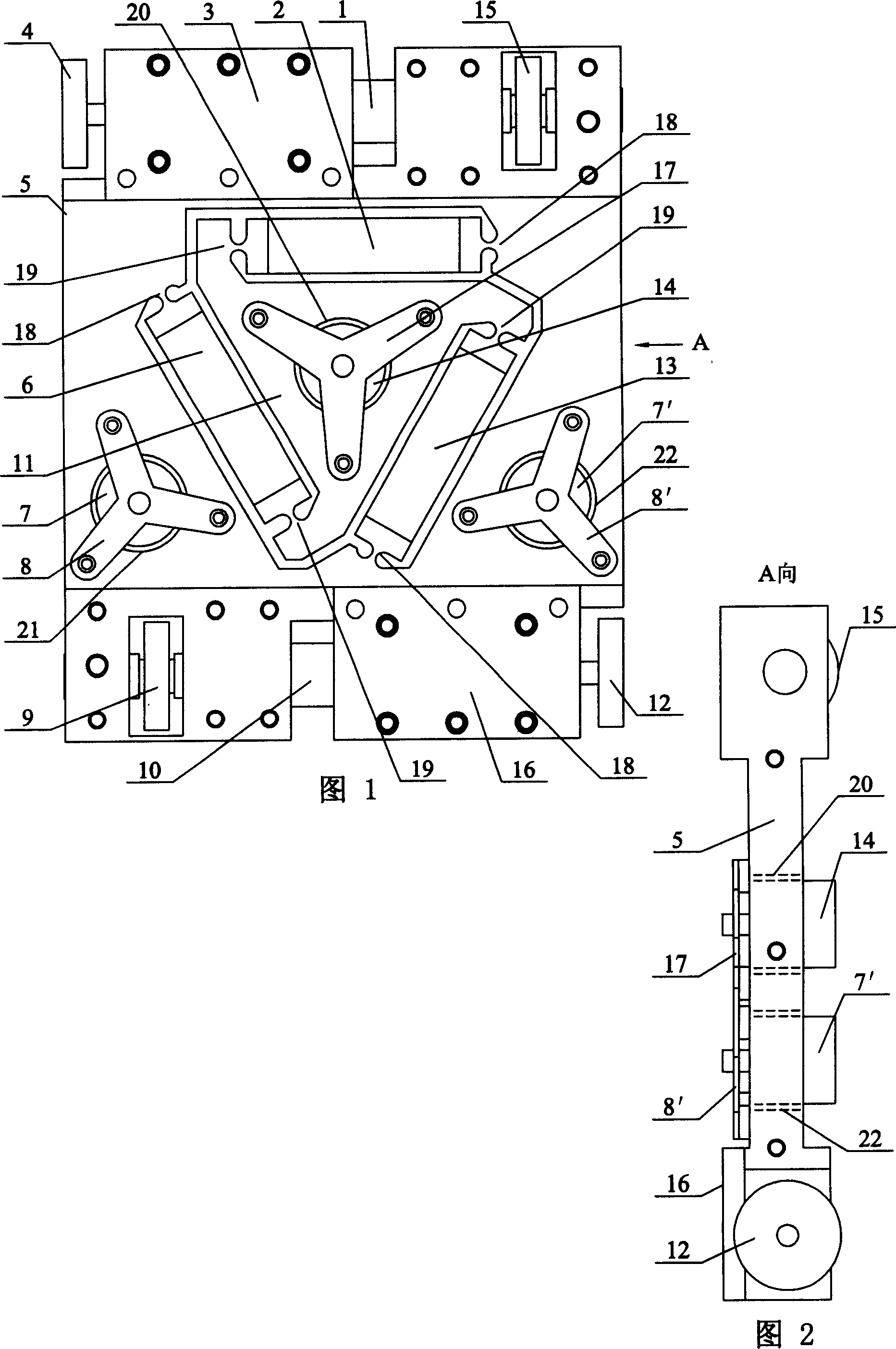
[0005] (See Fig. 1) This embodiment consists of No. 1 motor 1, No. 1 bipolar piezoelectric ceramics 2, No. 1 motor positioning end cover 3, No. 1 driving wheel 4, outer mobile positioning platform 5, and No. 2 bipolar piezoelectric ceramics. Electric ceramic 6, left outer electromagnet 7, left outer spring piece 8, No. 2 driven wheel 9, No. 2 motor 10, inner micro-motion positioning platform 11, No. 2 driving wheel 12, No. 3 bipolar piezoelectric ceramic 13, inner Electromagnet 14, No. 1 driven wheel 15, No. 2 motor positioning end cover 16, inner spring piece 17, right outer electromagnet 7', right outer spring piece 8'; No. 1 motor 1 is fixed by No. 1 motor positioning end cover 3 On one side of the outer mobile positioning platform 5, the No. 1 driving wheel 4 is fixed on the output shaft of the No. 1 motor 1, and the No. 1 driven wheel 15 is fixed on the outer mobile positioning platform 5 on the same side of the No. 1 motor. 10 is fixed on the other side of the outer mobi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More