

Perceptive bionic manipulator for clinical injured finger rehabilitation
A technology of manipulators and fingers, which is applied in the field of rehabilitation devices for traumatic fingers, can solve problems such as poor sensory function, lack of joint position, precise control of joint speed and rehabilitation force, force position information and rehabilitation effect cannot be established for effective evaluation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
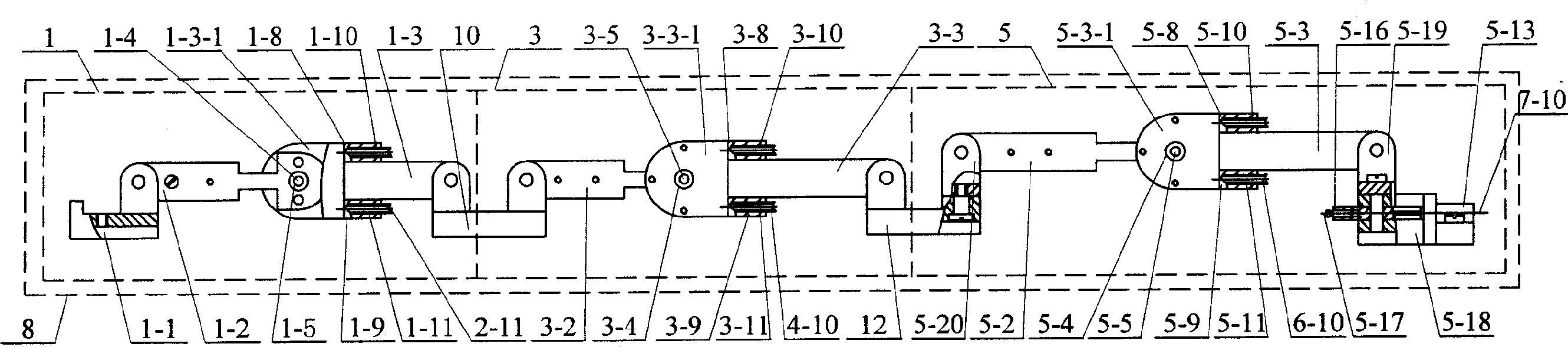
[0006] Specific implementation mode one: combine figure 1 , figure 2 ,image 3, Figure 4 Describe this embodiment, this embodiment is made up of the 3rd bionic finger module 1, frame assembly 11 and nail bionic muscle module 2; , the third connecting rod 1-3, the third shaft 1-4, the third magnetic steel 1-5, the third pulley 1-6, the third fixed column 1-7, the first cylinder 1-8, the second cylinder Tube 1-9, first spring 1-10, second spring 1-11, and second base 10; third base 1-1 is hinged to the left end of third torque sensor 1-2, and third torque sensor 1 -2 and the third pulley 1-6 are contained in the fork 1-3-1 of the third connecting rod 1-3 and are connected with the third connecting rod 1-3 with the third shaft 1-4, the third pulley 1- The end surface of 6 is fixedly equipped with the third fixed column 1-7, the third magnetic steel 1-5 is housed in the front end shaft hole of the third shaft 1-4, the third connecting rod 1-3 is hinged with the second machine ...
specific Embodiment approach 2
[0007] Specific embodiment two: illustrate this embodiment in conjunction with Fig. 3, nail tensioning mechanism 2-2 among the present embodiment is made up of first guide support 2-2-1, first fastening connector 2-2-2, first guide pin 2-2-3, the first fixed pin 2-2-4 is composed; the left end of the first guide bearing 2-2-1 passes through the first fastening connector 2-2-2 and the left end upper bracket 11- in the frame assembly 11 1 is connected, the upper end hole of the first guide bearing 2-2-1 is equipped with the lower end of the first fixed pin 2-2-4, and the upper end of the first fixed pin 2-2-4 is connected with the upper cover plate 11 in the frame assembly 11 The lower end faces of -5 are in contact, the upper end of the first guide pin 2-2-3 is installed in the lower end hole of the first guide support 2-2-1, and the lower end of the first guide pin 2-2-3 is installed in the frame assembly 11 In the first long hole 11-6-1 of the mounting plate 11-6. Other comp...
specific Embodiment approach 3
[0008] Specific implementation mode three: combination figure 1 , figure 2 , Figure 4 , Figure 5Describe this embodiment, this embodiment is made up of second knuckle module 3, frame assembly 11 and B bionic muscle module 4; Second connecting rod 3-3, second shaft 3-4, second magnetic steel 3-5, second pulley 3-6, second fixed column 3-7, third cylinder 3-8, fourth cylinder 3 -9, the third spring 3-10, the fourth spring 3-11 and the first base 12; the second base 10 is hinged with the left end of the second torque sensor 3-2, the second torque sensor 3-2 and the second torque sensor Two pulleys 3-6 are contained in the fork 3-3-1 of the second connecting rod 3-3 and are connected with the second connecting rod 3-3 with the second shaft 3-4, the end face of the second pulley 3-6 The second fixed column 3-7 is fixedly installed, the second magnetic steel 3-5 is housed in the front end shaft hole of the second shaft 3-4, the second connecting rod 3-3 is hinged with the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More