

Main operation hand with clamping force sensation
A main operator, clamping force technology, applied in the direction of surgery, manipulators, manufacturing tools, etc., to achieve the effect of reducing damage, eliminating compensation, and high stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The master operating hand with clamping force feeling of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
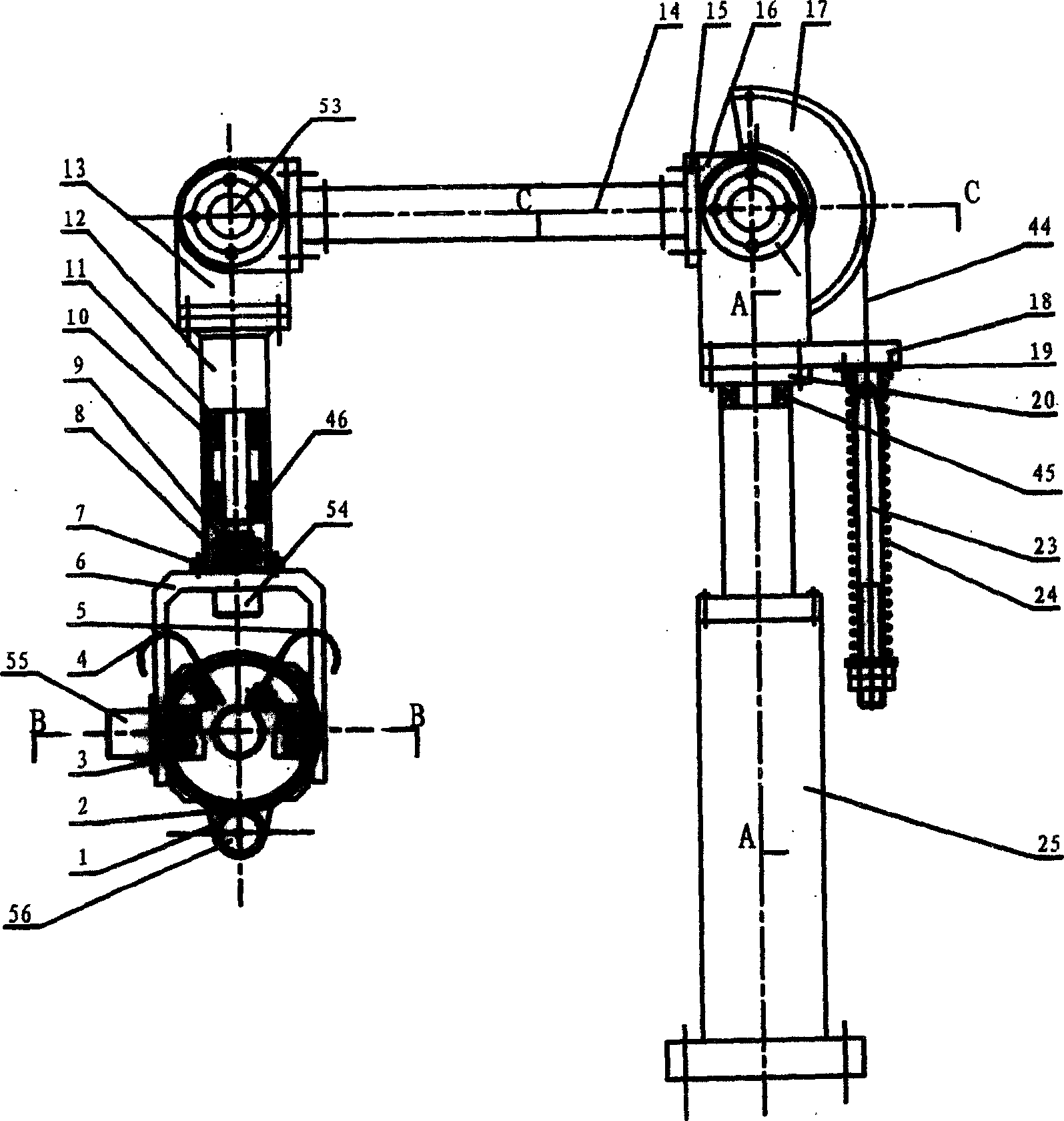
[0046] In the figure, the present invention is a main operating hand with clamping force feeling. The top of the central support 25 is sequentially provided with a trunk mechanism, a shoulder joint mechanism, a large arm mechanism, an elbow joint mechanism, a forearm mechanism, and a wrist joint mechanism. , Wrist rotation mechanism, finger opening and closing mechanism and balance device;
[0047] The trunk mechanism includes a central shaft sleeve 21 mechanically connected to the top of the central support, the central shaft sleeve 21 is equipped with a central shaft 20, and the central shaft 20 is covered with a large bushing 22 fixed on the central shaft sleeve 21 , the end of the central shaft 20 is provided with an active flange, the active flange is provided with a pin sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More